|
ABC: A System for Sequential Synthesis and Verification
|

|
|
ABC: A System for Sequential Synthesis and Verification
|
|
#include "llbInt.h"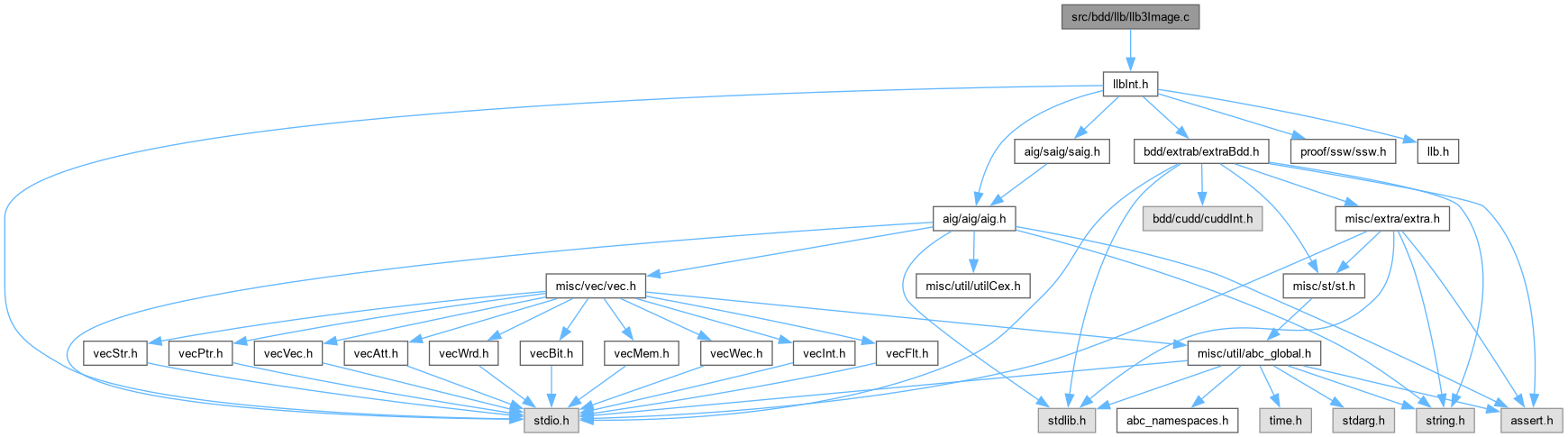
Go to the source code of this file.
Classes | |
| struct | Llb_Var_t_ |
| struct | Llb_Prt_t_ |
| struct | Llb_Mgr_t_ |
Macros | |
| #define | Llb_MgrForEachVar(p, pVar, i) |
| #define | Llb_MgrForEachPart(p, pPart, i) |
| #define | Llb_PartForEachVar(p, pPart, pVar, i) |
| #define | Llb_VarForEachPart(p, pVar, pPart, i) |
Typedefs | |
| typedef typedefABC_NAMESPACE_IMPL_START struct Llb_Var_t_ | Llb_Var_t |
| DECLARATIONS ///. | |
| typedef struct Llb_Prt_t_ | Llb_Prt_t |
| typedef struct Llb_Mgr_t_ | Llb_Mgr_t |
Variables | |
| abctime | timeBuild |
| abctime | timeAndEx |
| abctime | timeOther |
| int | nSuppMax |
| #define Llb_MgrForEachPart | ( | p, | |
| pPart, | |||
| i ) |
Definition at line 71 of file llb3Image.c.
| #define Llb_MgrForEachVar | ( | p, | |
| pVar, | |||
| i ) |
Definition at line 68 of file llb3Image.c.
| #define Llb_PartForEachVar | ( | p, | |
| pPart, | |||
| pVar, | |||
| i ) |
Definition at line 75 of file llb3Image.c.
| #define Llb_VarForEachPart | ( | p, | |
| pVar, | |||
| pPart, | |||
| i ) |
Definition at line 78 of file llb3Image.c.
| typedef struct Llb_Mgr_t_ Llb_Mgr_t |
Definition at line 46 of file llb3Image.c.
| typedef struct Llb_Prt_t_ Llb_Prt_t |
Definition at line 37 of file llb3Image.c.
| typedef typedefABC_NAMESPACE_IMPL_START struct Llb_Var_t_ Llb_Var_t |
DECLARATIONS ///.
CFile****************************************************************
FileName [llb3Image.c]
SystemName [ABC: Logic synthesis and verification system.]
PackageName [BDD based reachability.]
Synopsis [Computes image using partitioned structure.]
Author [Alan Mishchenko]
Affiliation [UC Berkeley]
Date [Ver. 1.0. Started - June 20, 2005.]
Revision [
]
Definition at line 29 of file llb3Image.c.
| void Llb_NonlinAddPair | ( | Llb_Mgr_t * | p, |
| DdNode * | bFunc, | ||
| int | iPart, | ||
| int | iVar ) |
Function*************************************************************
Synopsis [Starts non-linear quantification scheduling.]
Description []
SideEffects []
SeeAlso []
Definition at line 604 of file llb3Image.c.

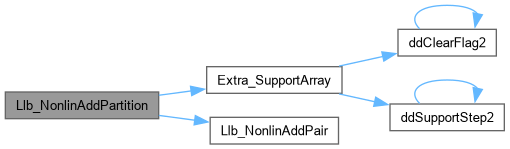
| void Llb_NonlinAddPartition | ( | Llb_Mgr_t * | p, |
| int | i, | ||
| DdNode * | bFunc ) |
Function*************************************************************
Synopsis [Starts non-linear quantification scheduling.]
Description []
SideEffects []
SeeAlso []
Definition at line 628 of file llb3Image.c.

| Llb_Mgr_t * Llb_NonlinAlloc | ( | Aig_Man_t * | pAig, |
| Vec_Ptr_t * | vLeaves, | ||
| Vec_Ptr_t * | vRoots, | ||
| int * | pVars2Q, | ||
| DdManager * | dd ) |
Function*************************************************************
Synopsis [Starts non-linear quantification scheduling.]
Description []
SideEffects []
SeeAlso []
Definition at line 830 of file llb3Image.c.

| Vec_Ptr_t * Llb_NonlinBuildBdds | ( | Aig_Man_t * | p, |
| Vec_Ptr_t * | vLower, | ||
| Vec_Ptr_t * | vUpper, | ||
| DdManager * | dd ) |
Function*************************************************************
Synopsis [Returns array of BDDs for the roots in terms of the leaves.]
Description []
SideEffects []
SeeAlso []
Definition at line 542 of file llb3Image.c.


| void Llb_NonlinCheckVars | ( | Llb_Mgr_t * | p | ) |
Function*************************************************************
Synopsis [Checks that each var appears in at least one partition.]
Description []
SideEffects []
SeeAlso []
Definition at line 686 of file llb3Image.c.

Function*************************************************************
Synopsis [Create cube with singleton variables.]
Description []
SideEffects []
SeeAlso []
Definition at line 139 of file llb3Image.c.

Function*************************************************************
Synopsis [Create cube of variables appearing only in two partitions.]
Description []
SideEffects []
SeeAlso []
Definition at line 172 of file llb3Image.c.

Function*************************************************************
Synopsis [Computes volume of the cut.]
Description []
SideEffects []
SeeAlso []
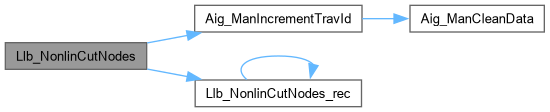
Definition at line 515 of file llb3Image.c.

Function*************************************************************
Synopsis [Computes volume of the cut.]
Description []
SideEffects []
SeeAlso []
Definition at line 486 of file llb3Image.c.

| void Llb_NonlinFree | ( | Llb_Mgr_t * | p | ) |
Function*************************************************************
Synopsis [Stops non-linear quantification scheduling.]
Description []
SideEffects []
SeeAlso []
Definition at line 858 of file llb3Image.c.

Function*************************************************************
Synopsis [Returns 1 if partition has singleton variables.]
Description []
SideEffects []
SeeAlso []
Definition at line 208 of file llb3Image.c.

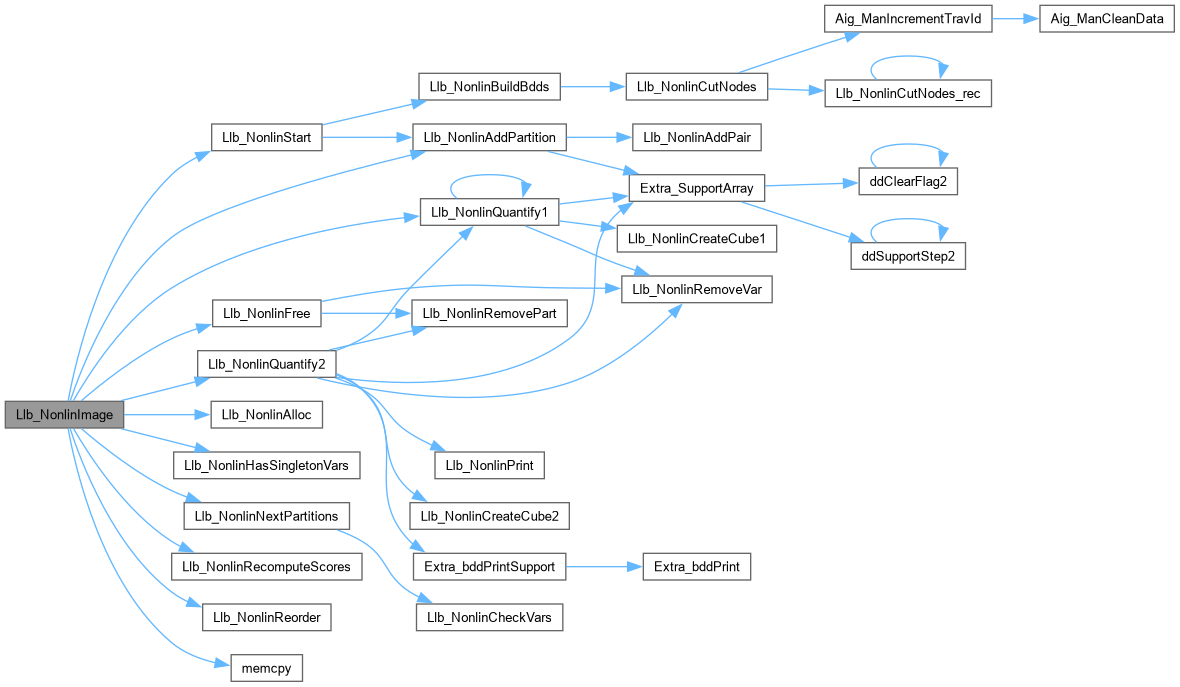
| DdNode * Llb_NonlinImage | ( | Aig_Man_t * | pAig, |
| Vec_Ptr_t * | vLeaves, | ||
| Vec_Ptr_t * | vRoots, | ||
| int * | pVars2Q, | ||
| DdManager * | dd, | ||
| DdNode * | bCurrent, | ||
| int | fReorder, | ||
| int | fVerbose, | ||
| int * | pOrder ) |
Function*************************************************************
Synopsis [Performs image computation.]
Description [Computes image of BDDs (vFuncs).]
SideEffects [BDDs in vFuncs are derefed inside. The result is refed.]
SeeAlso []
Definition at line 884 of file llb3Image.c.

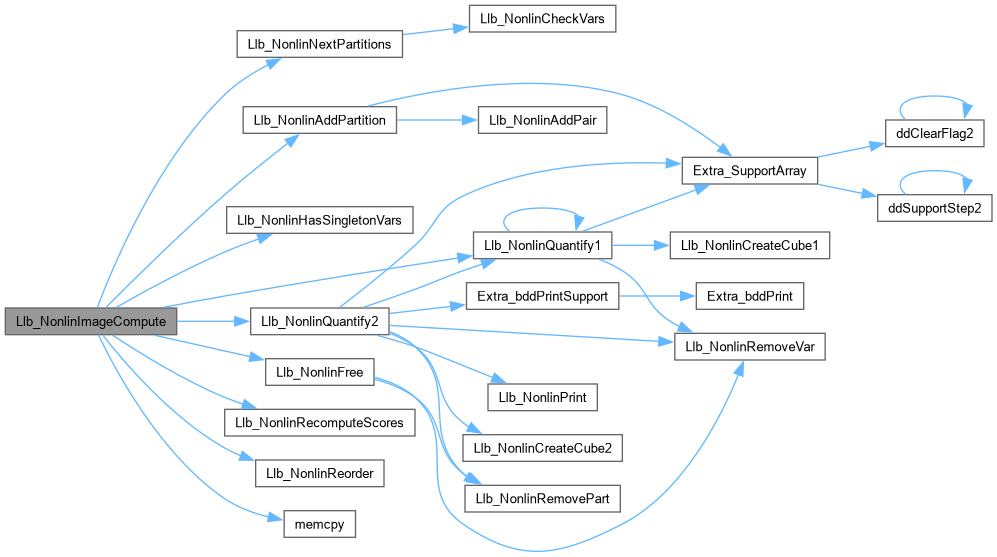
| DdNode * Llb_NonlinImageCompute | ( | DdNode * | bCurrent, |
| int | fReorder, | ||
| int | fDrop, | ||
| int | fVerbose, | ||
| int * | pOrder ) |
Function*************************************************************
Synopsis [Performs image computation.]
Description []
SideEffects []
SeeAlso []
Definition at line 999 of file llb3Image.c.

| void Llb_NonlinImageQuit | ( | ) |
Function*************************************************************
Synopsis [Quits image computation manager.]
Description []
SideEffects []
SeeAlso []
Definition at line 1075 of file llb3Image.c.


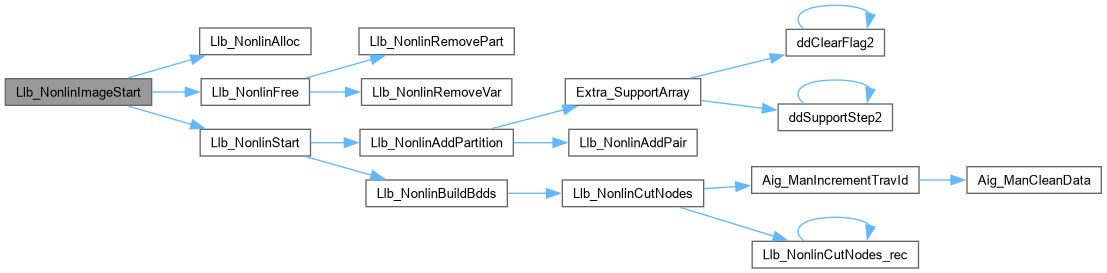
| DdManager * Llb_NonlinImageStart | ( | Aig_Man_t * | pAig, |
| Vec_Ptr_t * | vLeaves, | ||
| Vec_Ptr_t * | vRoots, | ||
| int * | pVars2Q, | ||
| int * | pOrder, | ||
| int | fFirst, | ||
| abctime | TimeTarget ) |
Function*************************************************************
Synopsis [Starts image computation manager.]
Description []
SideEffects []
SeeAlso []
Definition at line 963 of file llb3Image.c.

Function*************************************************************
Synopsis [Find next partition to quantify]
Description []
SideEffects []
SeeAlso []
Definition at line 705 of file llb3Image.c.


| void Llb_NonlinPrint | ( | Llb_Mgr_t * | p | ) |
Function*************************************************************
Synopsis [Returns 1 if partition has singleton variables.]
Description []
SideEffects []
SeeAlso []
Definition at line 229 of file llb3Image.c.

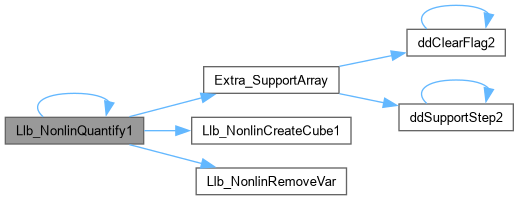
Function*************************************************************
Synopsis [Quantifies singles belonging to one partition.]
Description []
SideEffects []
SeeAlso []
Definition at line 262 of file llb3Image.c.

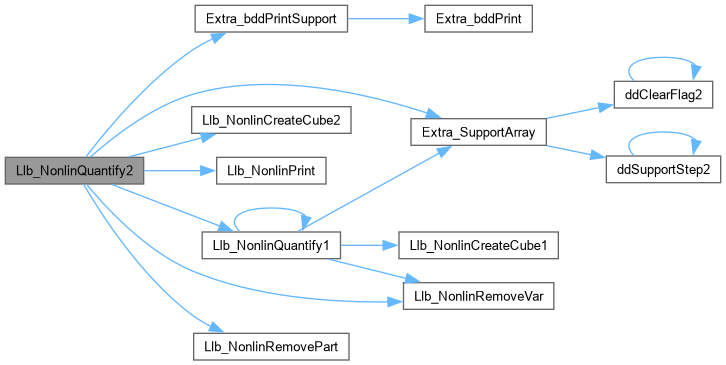
Function*************************************************************
Synopsis [Quantifies singles belonging to one partition.]
Description []
SideEffects []
SeeAlso []
Definition at line 342 of file llb3Image.c.

| void Llb_NonlinRecomputeScores | ( | Llb_Mgr_t * | p | ) |
Function*************************************************************
Synopsis [Recomputes scores after variable reordering.]
Description []
SideEffects []
SeeAlso []
Definition at line 777 of file llb3Image.c.

Function*************************************************************
Synopsis [Removes one partition.]
Description []
SideEffects []
SeeAlso []
Definition at line 119 of file llb3Image.c.

FUNCTION DEFINITIONS ///.
Function*************************************************************
Synopsis [Removes one variable.]
Description []
SideEffects []
SeeAlso []
Definition at line 100 of file llb3Image.c.

| void Llb_NonlinReorder | ( | DdManager * | dd, |
| int | fTwice, | ||
| int | fVerbose ) |
Function*************************************************************
Synopsis [Reorders BDDs in the working manager.]
Description []
SideEffects []
SeeAlso []
Definition at line 748 of file llb3Image.c.

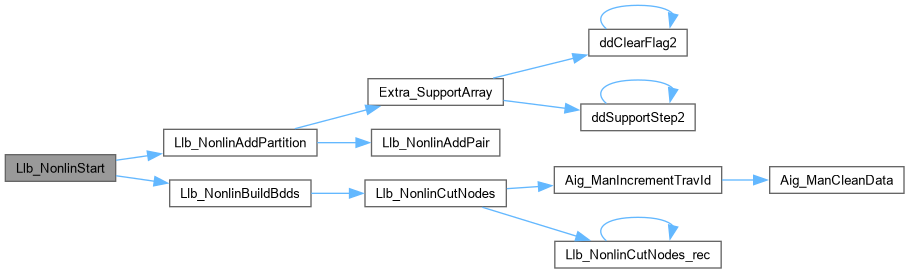
| int Llb_NonlinStart | ( | Llb_Mgr_t * | p | ) |
Function*************************************************************
Synopsis [Starts non-linear quantification scheduling.]
Description []
SideEffects []
SeeAlso []
Definition at line 660 of file llb3Image.c.

| void Llb_NonlinVerifyScores | ( | Llb_Mgr_t * | p | ) |
Function*************************************************************
Synopsis [Recomputes scores after variable reordering.]
Description []
SideEffects []
SeeAlso []
Definition at line 803 of file llb3Image.c.
| int nSuppMax |
Definition at line 83 of file llb3Image.c.
| abctime timeAndEx |
Definition at line 82 of file llb3Image.c.
| abctime timeBuild |
Definition at line 82 of file llb3Image.c.
| abctime timeOther |
Definition at line 82 of file llb3Image.c.