|
ABC: A System for Sequential Synthesis and Verification
|

|
|
ABC: A System for Sequential Synthesis and Verification
|
|
Go to the source code of this file.
Classes | |
| struct | Aig_Gla3Man_t_ |
Macros | |
| #define | ABC_CPS 1000 |
| FUNCTION DEFINITIONS ///. | |
Typedefs | |
| typedef typedefABC_NAMESPACE_IMPL_START struct Aig_Gla3Man_t_ | Aig_Gla3Man_t |
| DECLARATIONS ///. | |
Functions | |
| int | Aig_Gla3FetchVar (Aig_Gla3Man_t *p, Aig_Obj_t *pObj, int k) |
| void | Aig_Gla3AssignVars_rec (Aig_Gla3Man_t *p, Aig_Obj_t *pObj, int f) |
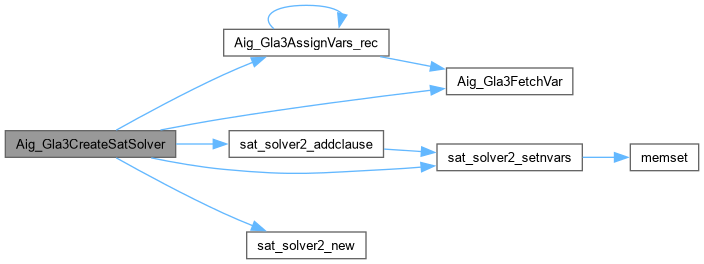
| int | Aig_Gla3CreateSatSolver (Aig_Gla3Man_t *p) |
| Aig_Gla3Man_t * | Aig_Gla3ManStart (Aig_Man_t *pAig, int nStart, int nFramesMax, int fVerbose) |
| void | Aig_Gla3ManStop (Aig_Gla3Man_t *p) |
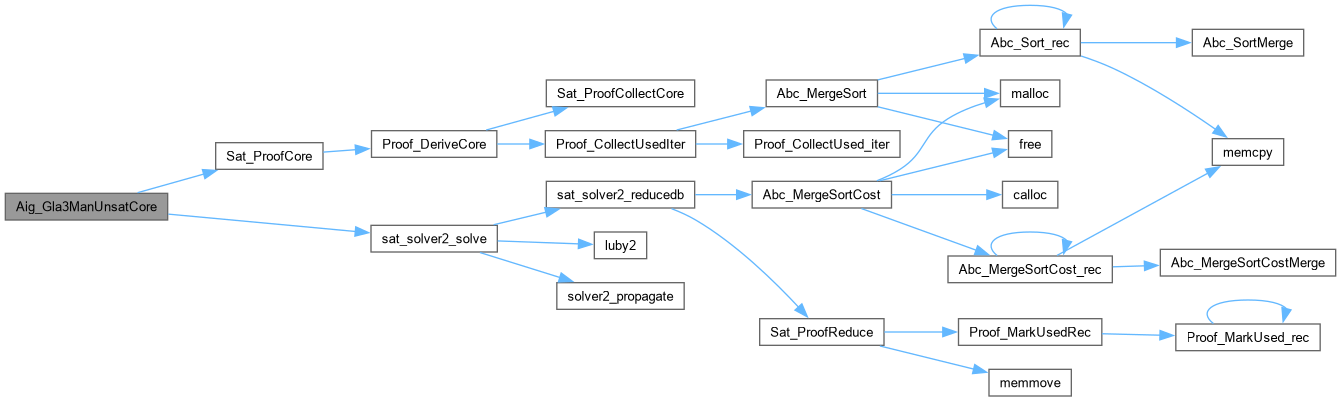
| Vec_Int_t * | Aig_Gla3ManUnsatCore (sat_solver2 *pSat, int nConfMax, int fVerbose, int *piRetValue) |
| Vec_Int_t * | Aig_Gla3ManCollect (Aig_Gla3Man_t *p, Vec_Int_t *vCore) |
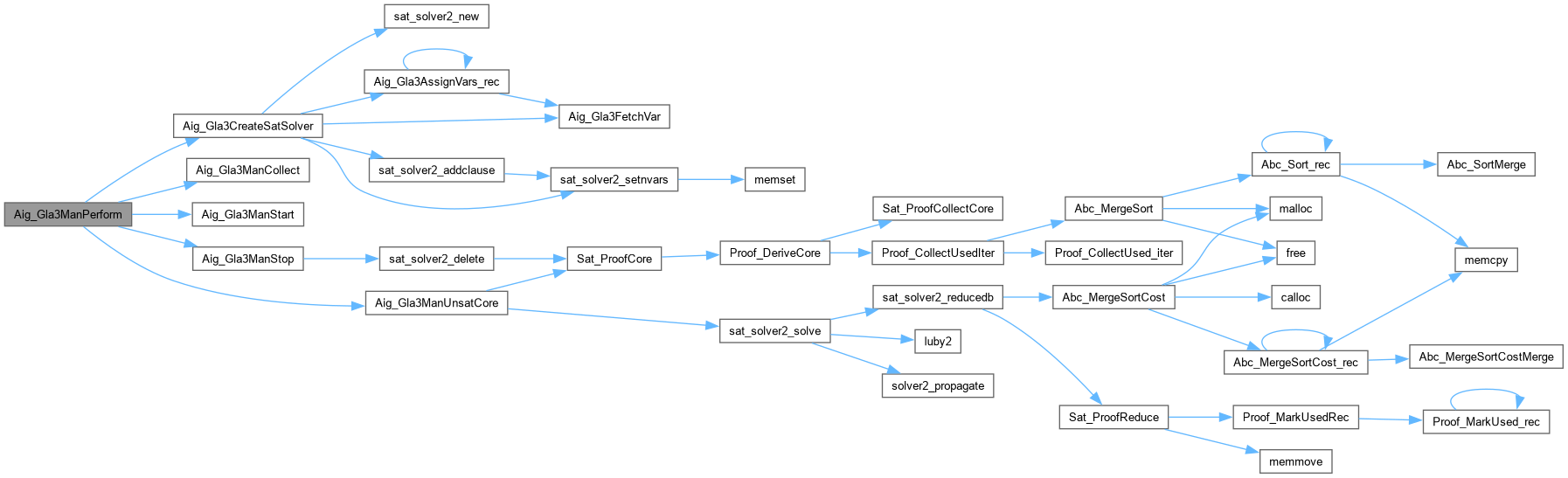
| Vec_Int_t * | Aig_Gla3ManPerform (Aig_Man_t *pAig, int nStart, int nFramesMax, int nConfLimit, int TimeLimit, int fSkipRand, int fVerbose) |
| #define ABC_CPS 1000 |
FUNCTION DEFINITIONS ///.
Definition at line 59 of file saigGlaPba2.c.
| typedef typedefABC_NAMESPACE_IMPL_START struct Aig_Gla3Man_t_ Aig_Gla3Man_t |
DECLARATIONS ///.
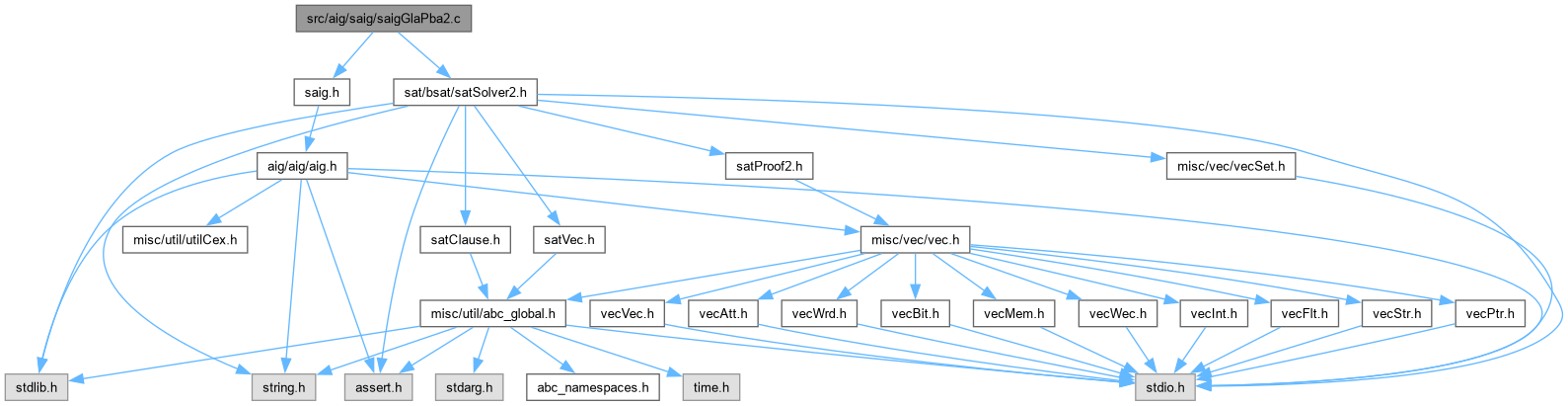
CFile****************************************************************
FileName [saigGlaPba.c]
SystemName [ABC: Logic synthesis and verification system.]
PackageName [Sequential AIG package.]
Synopsis [Gate level abstraction.]
Author [Alan Mishchenko]
Affiliation [UC Berkeley]
Date [Ver. 1.0. Started - June 20, 2005.]
Revision [
]
Definition at line 31 of file saigGlaPba2.c.
| void Aig_Gla3AssignVars_rec | ( | Aig_Gla3Man_t * | p, |
| Aig_Obj_t * | pObj, | ||
| int | f ) |
Function*************************************************************
Synopsis [Assigns variables to the AIG nodes.]
Description []
SideEffects []
SeeAlso []
Definition at line 188 of file saigGlaPba2.c.


| int Aig_Gla3CreateSatSolver | ( | Aig_Gla3Man_t * | p | ) |
Function*************************************************************
Synopsis [Creates SAT solver.]
Description []
SideEffects []
SeeAlso []
Definition at line 223 of file saigGlaPba2.c.

| int Aig_Gla3FetchVar | ( | Aig_Gla3Man_t * | p, |
| Aig_Obj_t * | pObj, | ||
| int | k ) |
Function*************************************************************
Synopsis [Finds existing SAT variable or creates a new one.]
Description []
SideEffects []
SeeAlso []
Definition at line 154 of file saigGlaPba2.c.

| Vec_Int_t * Aig_Gla3ManCollect | ( | Aig_Gla3Man_t * | p, |
| Vec_Int_t * | vCore ) |
Function*************************************************************
Synopsis [Collects abstracted objects.]
Description []
SideEffects []
SeeAlso []
Definition at line 443 of file saigGlaPba2.c.

| Vec_Int_t * Aig_Gla3ManPerform | ( | Aig_Man_t * | pAig, |
| int | nStart, | ||
| int | nFramesMax, | ||
| int | nConfLimit, | ||
| int | TimeLimit, | ||
| int | fSkipRand, | ||
| int | fVerbose ) |
Function*************************************************************
Synopsis [Performs gate-level localization abstraction.]
Description [Returns array of objects included in the abstraction. This array may contain only const1, flop outputs, and internal nodes, that is, objects that should have clauses added to the SAT solver.]
SideEffects []
SeeAlso []
Definition at line 495 of file saigGlaPba2.c.
| Aig_Gla3Man_t * Aig_Gla3ManStart | ( | Aig_Man_t * | pAig, |
| int | nStart, | ||
| int | nFramesMax, | ||
| int | fVerbose ) |
Function*************************************************************
Synopsis []
Description []
SideEffects []
SeeAlso []
Definition at line 329 of file saigGlaPba2.c.

| void Aig_Gla3ManStop | ( | Aig_Gla3Man_t * | p | ) |
Function*************************************************************
Synopsis []
Description []
SideEffects []
SeeAlso []
Definition at line 367 of file saigGlaPba2.c.


| Vec_Int_t * Aig_Gla3ManUnsatCore | ( | sat_solver2 * | pSat, |
| int | nConfMax, | ||
| int | fVerbose, | ||
| int * | piRetValue ) |
Function*************************************************************
Synopsis [Finds the set of clauses involved in the UNSAT core.]
Description []
SideEffects []
SeeAlso []
Definition at line 393 of file saigGlaPba2.c.