|
ABC: A System for Sequential Synthesis and Verification
|

|
|
ABC: A System for Sequential Synthesis and Verification
|
|
Go to the source code of this file.
Classes | |
| struct | Emb_Obj_t_ |
| struct | Emb_Man_t_ |
Macros | |
| #define | GIA_PLACE_SIZE 0x7fff |
| DECLARATIONS ///. | |
| #define | Emb_ManForEachObj(p, pObj, i) |
| #define | Emb_ManForEachNode(p, pObj, i) |
| #define | Emb_ManForEachObjVec(vVec, p, pObj, i) |
| #define | Emb_ObjForEachFanin(pObj, pNext, i) |
| #define | Emb_ObjForEachFanout(pObj, pNext, i) |
Typedefs | |
| typedef float | Emb_Dat_t |
| typedef struct Emb_Obj_t_ | Emb_Obj_t |
| typedef struct Emb_Man_t_ | Emb_Man_t |
| #define Emb_ManForEachNode | ( | p, | |
| pObj, | |||
| i ) |
Definition at line 129 of file giaEmbed.c.
| #define Emb_ManForEachObj | ( | p, | |
| pObj, | |||
| i ) |
Definition at line 127 of file giaEmbed.c.
| #define Emb_ManForEachObjVec | ( | vVec, | |
| p, | |||
| pObj, | |||
| i ) |
Definition at line 131 of file giaEmbed.c.
| #define Emb_ObjForEachFanin | ( | pObj, | |
| pNext, | |||
| i ) |
Definition at line 133 of file giaEmbed.c.
| #define Emb_ObjForEachFanout | ( | pObj, | |
| pNext, | |||
| i ) |
Definition at line 135 of file giaEmbed.c.
| #define GIA_PLACE_SIZE 0x7fff |
DECLARATIONS ///.
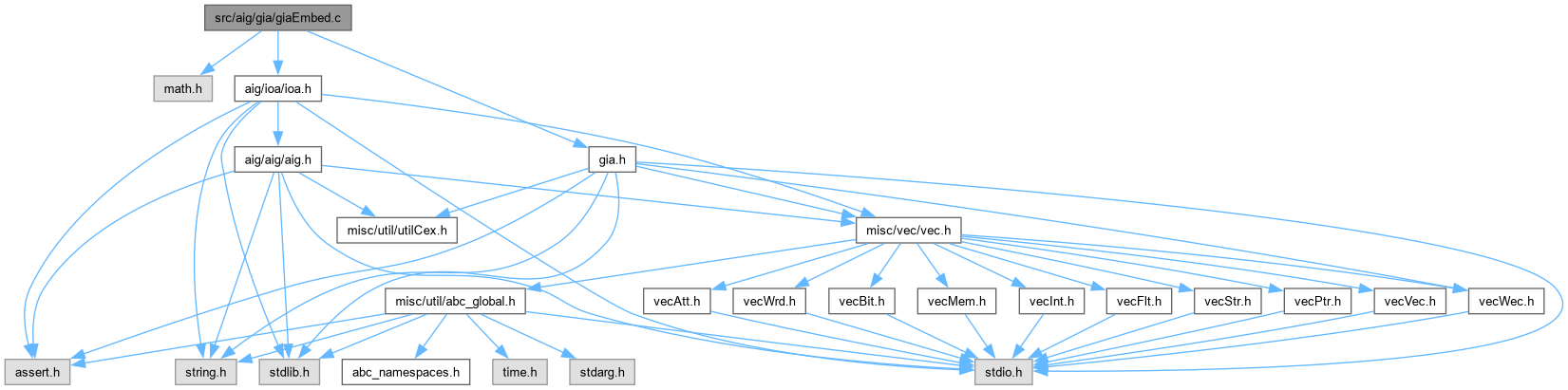
CFile****************************************************************
FileName [giaEmbed.c]
SystemName [ABC: Logic synthesis and verification system.]
PackageName [Scalable AIG package.]
Synopsis [Logic network derived from AIG.]
Author [Alan Mishchenko]
Affiliation [UC Berkeley]
Date [Ver. 1.0. Started - June 20, 2005.]
Revision [
]
Definition at line 43 of file giaEmbed.c.
| typedef float Emb_Dat_t |
Definition at line 46 of file giaEmbed.c.
| typedef struct Emb_Man_t_ Emb_Man_t |
Definition at line 69 of file giaEmbed.c.
| typedef struct Emb_Obj_t_ Emb_Obj_t |
Definition at line 48 of file giaEmbed.c.
| void Emb_DumpGraphIntoFile | ( | Emb_Man_t * | p | ) |
Function*************************************************************
Synopsis [Computes the distances from the given set of objects.]
Description [Returns one of the most distant objects.]
SideEffects []
SeeAlso []
Definition at line 1072 of file giaEmbed.c.
| void Emb_ManCleanTravId | ( | Emb_Man_t * | p | ) |
Function*************************************************************
Synopsis [Cleans the value.]
Description []
SideEffects []
SeeAlso []
Definition at line 451 of file giaEmbed.c.
| void Emb_ManCollectSuper | ( | Gia_Man_t * | p, |
| Gia_Obj_t * | pObj, | ||
| Vec_Int_t * | vSuper, | ||
| Vec_Int_t * | vVisit ) |
Function*************************************************************
Synopsis [Collect the fanin IDs.]
Description []
SideEffects []
SeeAlso []
Definition at line 312 of file giaEmbed.c.


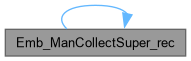
| void Emb_ManCollectSuper_rec | ( | Gia_Man_t * | p, |
| Gia_Obj_t * | pObj, | ||
| Vec_Int_t * | vSuper, | ||
| Vec_Int_t * | vVisit ) |
Function*************************************************************
Synopsis [Collect the fanin IDs.]
Description []
SideEffects []
SeeAlso []
Definition at line 284 of file giaEmbed.c.

| void Emb_ManComputeCovariance | ( | Emb_Man_t * | p, |
| int | nDims ) |
Function*************************************************************
Synopsis [Computes covariance matrix.]
Description []
SideEffects []
SeeAlso []
Definition at line 1191 of file giaEmbed.c.


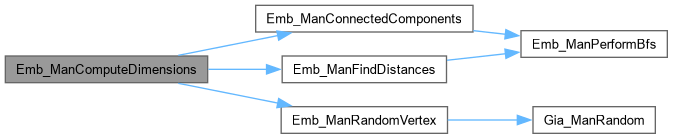
| void Emb_ManComputeDimensions | ( | Emb_Man_t * | p, |
| int | nDims ) |
Function*************************************************************
Synopsis [Computes dimentions of the graph.]
Description []
SideEffects []
SeeAlso []
Definition at line 1102 of file giaEmbed.c.

Function*************************************************************
Synopsis [Computes the distance from the given object]
Description []
SideEffects []
SeeAlso []
Definition at line 783 of file giaEmbed.c.

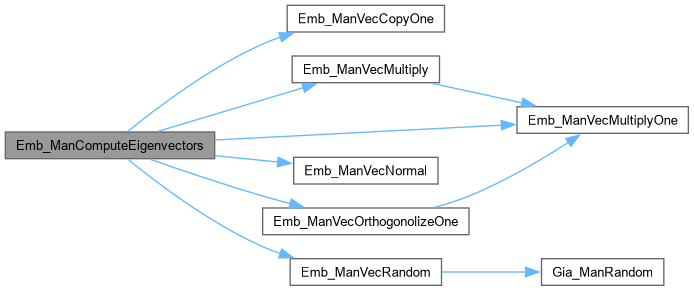
| void Emb_ManComputeEigenvectors | ( | Emb_Man_t * | p, |
| int | nDims, | ||
| int | nSols ) |
Function*************************************************************
Synopsis [Computes the first nSols eigen-vectors.]
Description []
SideEffects []
SeeAlso []
Definition at line 1358 of file giaEmbed.c.

| double Emb_ManComputeHPWL | ( | Emb_Man_t * | p | ) |
Function*************************************************************
Synopsis [Computes wire-length.]
Description []
SideEffects []
SeeAlso []
Definition at line 1489 of file giaEmbed.c.

| void Emb_ManComputeSolutions | ( | Emb_Man_t * | p, |
| int | nDims, | ||
| int | nSols ) |
Function*************************************************************
Synopsis [Derives solutions from original vectors and eigenvectors.]
Description []
SideEffects []
SeeAlso []
Definition at line 1397 of file giaEmbed.c.

Function*************************************************************
Synopsis [Computes the distances from the given set of objects.]
Description [Returns one of the most distant objects.]
SideEffects []
SeeAlso []
Definition at line 977 of file giaEmbed.c.


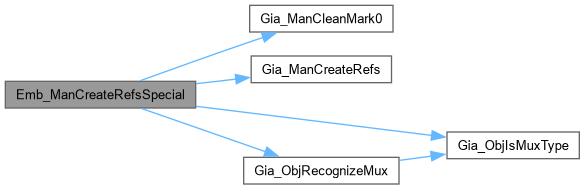
| void Emb_ManCreateRefsSpecial | ( | Gia_Man_t * | p | ) |
Function*************************************************************
Synopsis [Assigns references while removing the MUX/XOR ones.]
Description []
SideEffects []
SeeAlso []
Definition at line 336 of file giaEmbed.c.

| void Emb_ManDerivePlacement | ( | Emb_Man_t * | p, |
| int | nSols ) |
Function*************************************************************
Synopsis [Projects into square of size [0;GIA_PLACE_SIZE] x [0;GIA_PLACE_SIZE].]
Description []
SideEffects []
SeeAlso []
Definition at line 1427 of file giaEmbed.c.


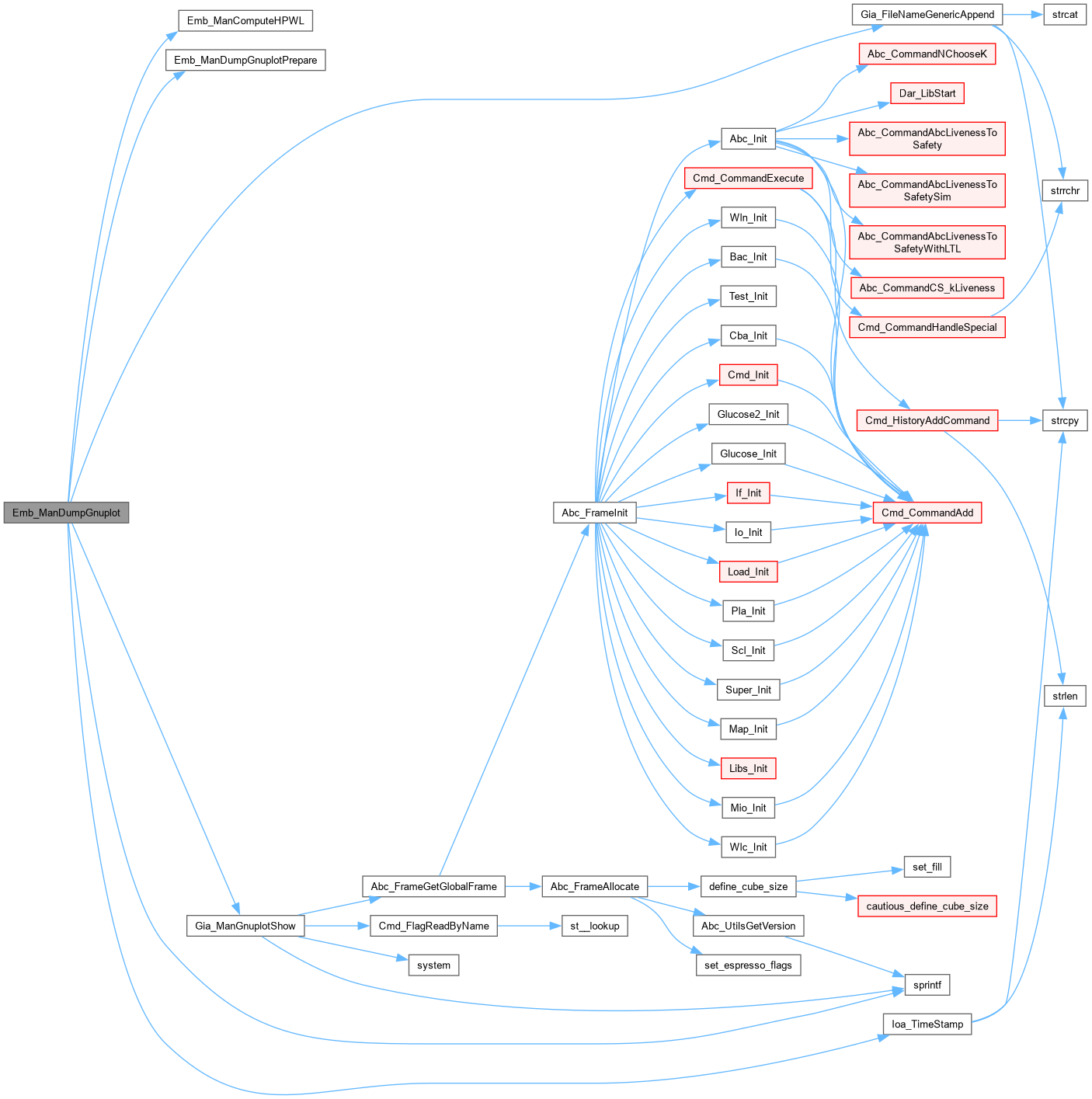
| void Emb_ManDumpGnuplot | ( | Emb_Man_t * | p, |
| char * | pName, | ||
| int | fDumpLarge, | ||
| int | fShowImage ) |
Function*************************************************************
Synopsis [Derives solutions from original vectors and eigenvectors.]
Description []
SideEffects []
SeeAlso []
Definition at line 1695 of file giaEmbed.c.

Function*************************************************************
Synopsis [Prepares image for dumping.]
Description []
SideEffects []
SeeAlso []
Definition at line 1633 of file giaEmbed.c.

Function*************************************************************
Synopsis [Computes the distances from the given set of objects.]
Description [Returns one of the most distant objects.]
SideEffects []
SeeAlso []
Definition at line 1016 of file giaEmbed.c.


| float ** Emb_ManMatrAlloc | ( | int | nDims | ) |
Function*************************************************************
Synopsis [Allocated square matrix of floats.]
Description []
SideEffects []
SeeAlso []
Definition at line 1170 of file giaEmbed.c.

| Emb_Obj_t * Emb_ManPerformBfs | ( | Emb_Man_t * | p, |
| Vec_Int_t * | vThis, | ||
| Vec_Int_t * | vNext, | ||
| Emb_Dat_t * | pDist ) |
Function*************************************************************
Synopsis [Perform BFS from the set of nodes.]
Description [Returns one of the most distant objects.]
SideEffects []
SeeAlso []
Definition at line 930 of file giaEmbed.c.

| void Emb_ManPlacementRefine | ( | Emb_Man_t * | p, |
| int | nIters, | ||
| int | fVerbose ) |
Function*************************************************************
Synopsis [Performs iterative refinement of the given placement.]
Description []
SideEffects []
SeeAlso []
Definition at line 1524 of file giaEmbed.c.


| void Emb_ManPrintFanio | ( | Emb_Man_t * | p | ) |
Function*************************************************************
Synopsis [Prints the distribution of fanins/fanouts in the network.]
Description []
SideEffects []
SeeAlso []
Definition at line 675 of file giaEmbed.c.

| void Emb_ManPrintSolutions | ( | Emb_Man_t * | p, |
| int | nSols ) |
Function*************************************************************
Synopsis [Derives solutions from original vectors and eigenvectors.]
Description []
SideEffects []
SeeAlso []
Definition at line 1609 of file giaEmbed.c.
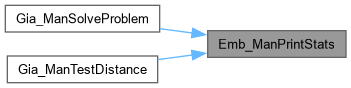
| void Emb_ManPrintStats | ( | Emb_Man_t * | p | ) |
Function*************************************************************
Synopsis [Creates logic network isomorphic to the given AIG.]
Description []
SideEffects []
SeeAlso []
Definition at line 622 of file giaEmbed.c.
Function*************************************************************
Synopsis [Traverses from the given node.]
Description []
SideEffects []
SeeAlso []
Definition at line 1047 of file giaEmbed.c.


| void Emb_ManSetValue | ( | Emb_Man_t * | p | ) |
Function*************************************************************
Synopsis [Cleans the value.]
Description []
SideEffects []
SeeAlso []
Definition at line 470 of file giaEmbed.c.

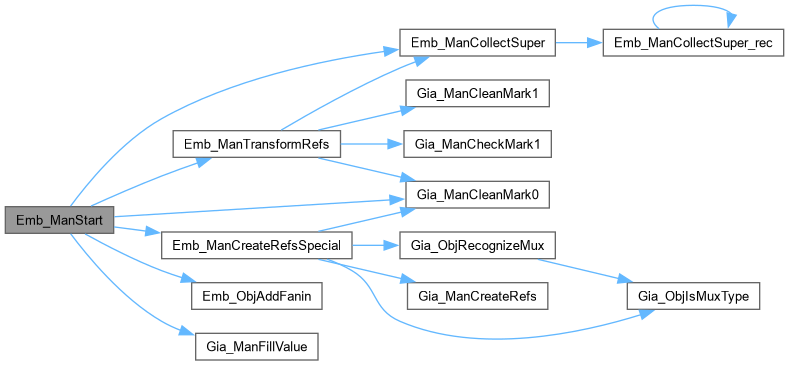
Function*************************************************************
Synopsis [Creates logic network isomorphic to the given AIG.]
Description []
SideEffects []
SeeAlso []
Definition at line 493 of file giaEmbed.c.
Function*************************************************************
Synopsis [Creates logic network isomorphic to the given AIG.]
Description []
SideEffects []
SeeAlso []
Definition at line 172 of file giaEmbed.c.

| void Emb_ManStop | ( | Emb_Man_t * | p | ) |
Function*************************************************************
Synopsis [Creates logic network isomorphic to the given AIG.]
Description []
SideEffects []
SeeAlso []
Definition at line 651 of file giaEmbed.c.

| void Emb_ManTransformRefs | ( | Gia_Man_t * | p, |
| int * | pnObjs, | ||
| int * | pnFanios ) |
Function*************************************************************
Synopsis [Assigns references while removing the MUX/XOR ones.]
Description []
SideEffects []
SeeAlso []
Definition at line 382 of file giaEmbed.c.

| void Emb_ManVecCopyOne | ( | float * | pVecDest, |
| float * | pVecSour, | ||
| int | nDims ) |
Function*************************************************************
Synopsis [Copies the vector.]
Description []
SideEffects []
SeeAlso []
Definition at line 1304 of file giaEmbed.c.

| void Emb_ManVecMultiply | ( | float ** | pMatr, |
| float * | pVec, | ||
| int | nDims, | ||
| float * | pRes ) |
Function*************************************************************
Synopsis [Multiplies matrix by vector.]
Description []
SideEffects []
SeeAlso []
Definition at line 1322 of file giaEmbed.c.


| float Emb_ManVecMultiplyOne | ( | float * | pVec0, |
| float * | pVec1, | ||
| int | nDims ) |
Function*************************************************************
Synopsis [Multiplies vector by vector.]
Description []
SideEffects []
SeeAlso []
Definition at line 1284 of file giaEmbed.c.

| void Emb_ManVecNormal | ( | float * | pVec, |
| int | nDims ) |
Function*************************************************************
Synopsis [Returns normalized vector.]
Description []
SideEffects []
SeeAlso []
Definition at line 1262 of file giaEmbed.c.

| void Emb_ManVecOrthogonolizeOne | ( | float * | pEigen, |
| float * | pVecI, | ||
| int | nDims, | ||
| float * | pVecRes ) |
Function*************************************************************
Synopsis [Multiplies vector by matrix.]
Description []
SideEffects []
SeeAlso []
Definition at line 1340 of file giaEmbed.c.


| void Emb_ManVecRandom | ( | float * | pVec, |
| int | nDims ) |
Function*************************************************************
Synopsis [Returns random vector.]
Description []
SideEffects []
SeeAlso []
Definition at line 1244 of file giaEmbed.c.


FUNCTION DEFINITIONS ///.
Function*************************************************************
Synopsis [Creates fanin/fanout pair.]
Description []
SideEffects []
SeeAlso []
Definition at line 153 of file giaEmbed.c.

Function*************************************************************
Synopsis [Computes dimentions of the graph.]
Description []
SideEffects []
SeeAlso []
Definition at line 1791 of file giaEmbed.c.
| void Gia_ManTestDistance | ( | Gia_Man_t * | pGia | ) |
Function*************************************************************
Synopsis [Returns sorted array of node handles with largest fanout.]
Description []
SideEffects []
SeeAlso []
Definition at line 904 of file giaEmbed.c.
| void Gia_ManTestDistanceInternal | ( | Emb_Man_t * | p | ) |
Function*************************************************************
Synopsis [Traverses from the given node.]
Description []
SideEffects []
SeeAlso []
Definition at line 838 of file giaEmbed.c.

