|
ABC: A System for Sequential Synthesis and Verification
|

|
|
ABC: A System for Sequential Synthesis and Verification
|
|
Go to the source code of this file.
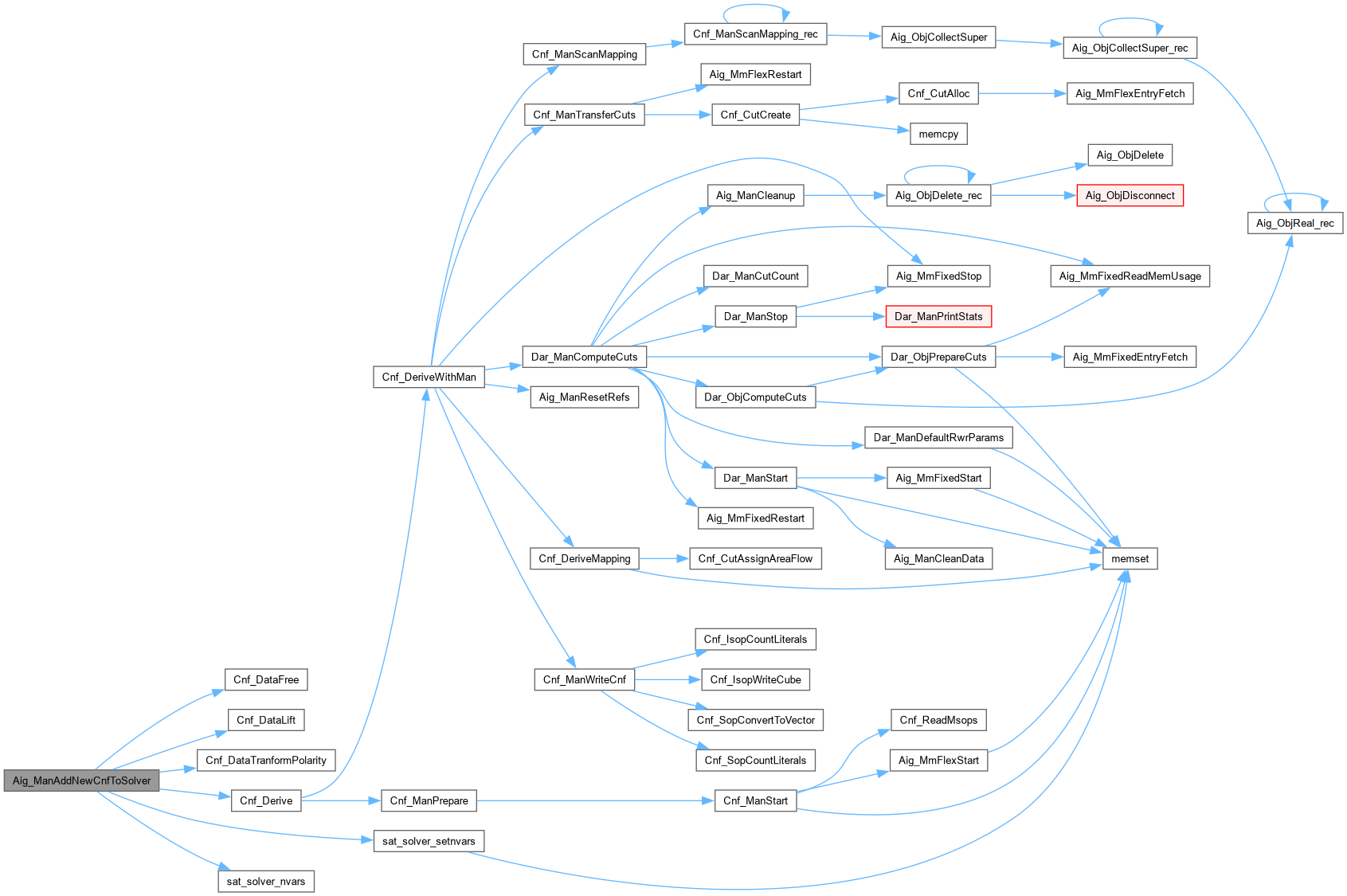
| int Aig_ManAddNewCnfToSolver | ( | sat_solver * | pSat, |
| Aig_Man_t * | pAig, | ||
| Vec_Int_t * | vNode2Var, | ||
| Vec_Int_t * | vPioIds, | ||
| Vec_Ptr_t * | vPartPos, | ||
| int | fAlignPol ) |
Function*************************************************************
Synopsis [Derives CNF for the partition (pAig) and adds it to solver.]
Description [Array vPio2Id contains mapping of the PI/PO terminal of pAig into the IDs of the corresponding original nodes. Array vNode2Var contains mapping of the original nodes into their SAT variable numbers.]
SideEffects []
SeeAlso []
Definition at line 378 of file aigPartSat.c.

| void Aig_ManDeriveCounterExample | ( | Aig_Man_t * | p, |
| Vec_Int_t * | vNode2Var, | ||
| sat_solver * | pSat ) |
Function*************************************************************
Synopsis [Sets polarity according to the original nodes.]
Description []
SideEffects []
SeeAlso []
Definition at line 350 of file aigPartSat.c.


Function*************************************************************
Synopsis [Partitioning using DFS order.]
Description []
SideEffects []
SeeAlso []
Definition at line 103 of file aigPartSat.c.


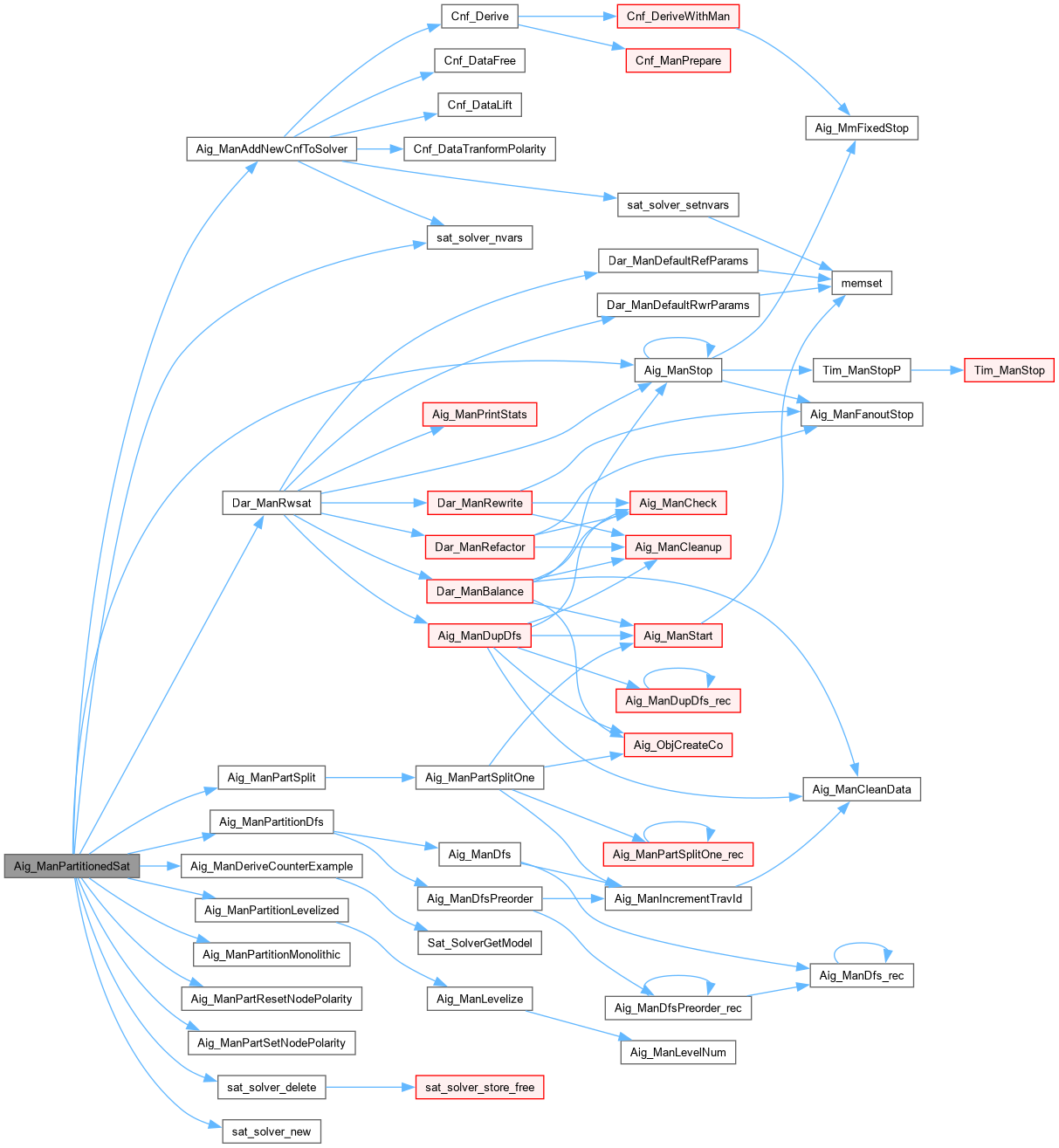
| int Aig_ManPartitionedSat | ( | Aig_Man_t * | p, |
| int | nAlgo, | ||
| int | nPartSize, | ||
| int | nConfPart, | ||
| int | nConfTotal, | ||
| int | fAlignPol, | ||
| int | fSynthesize, | ||
| int | fVerbose ) |
Function*************************************************************
Synopsis [Performs partitioned SAT solving.]
Description []
SideEffects []
SeeAlso []
Definition at line 491 of file aigPartSat.c.

Function*************************************************************
Synopsis [Partitioning using levelized order.]
Description []
SideEffects []
SeeAlso []
Definition at line 78 of file aigPartSat.c.


FUNCTION DEFINITIONS ///.
Function*************************************************************
Synopsis [No partitioning.]
Description [The partitioner ]
SideEffects []
SeeAlso []
Definition at line 60 of file aigPartSat.c.

| void Aig_ManPartResetNodePolarity | ( | Aig_Man_t * | pPart | ) |
Function*************************************************************
Synopsis [Resets node polarity to unbias the polarity of CNF variables.]
Description []
SideEffects []
SeeAlso []
Definition at line 300 of file aigPartSat.c.

Function*************************************************************
Synopsis [Sets polarity according to the original nodes.]
Description []
SideEffects []
SeeAlso []
Definition at line 319 of file aigPartSat.c.

| Vec_Ptr_t * Aig_ManPartSplit | ( | Aig_Man_t * | p, |
| Vec_Int_t * | vNode2Part, | ||
| Vec_Ptr_t ** | pvPio2Id, | ||
| Vec_Ptr_t ** | pvPart2Pos ) |
Function*************************************************************
Synopsis [Derives AIGs for each partition.]
Description [The first argument is a original AIG. The second argument is the array mapping each AND-node's ID into the 0-based number of its partition. The last argument is the array of arrays (one for each new AIG) mapping the index of each terminal in the new AIG (the index of each terminal is derived by ordering PIs followed by POs in their natural order) into the ID of the corresponding node in the original AIG. The returned value is the array of AIGs representing the partitions.]
SideEffects []
SeeAlso []
Definition at line 225 of file aigPartSat.c.


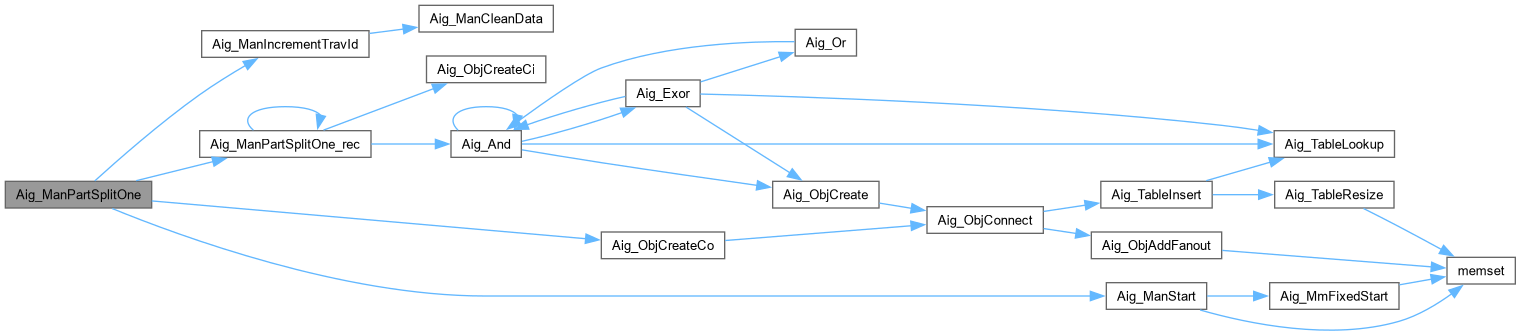
Function*************************************************************
Synopsis [Carves out one partition of the AIG.]
Description []
SideEffects []
SeeAlso []
Definition at line 177 of file aigPartSat.c.

| void Aig_ManPartSplitOne_rec | ( | Aig_Man_t * | pNew, |
| Aig_Man_t * | p, | ||
| Aig_Obj_t * | pObj, | ||
| Vec_Int_t * | vPio2Id ) |
Function*************************************************************
Synopsis [Recursively constructs the partition.]
Description []
SideEffects []
SeeAlso []
Definition at line 137 of file aigPartSat.c.


|
extern |
DECLARATIONS ///.
CFile****************************************************************
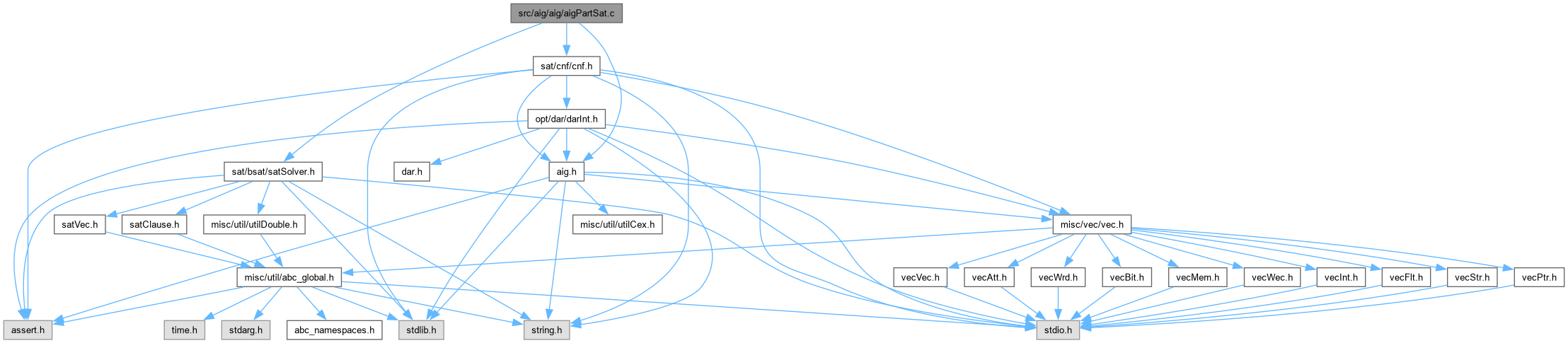
FileName [aigPartSat.c]
SystemName [ABC: Logic synthesis and verification system.]
PackageName [AIG package.]
Synopsis [Partitioning for SAT solving.]
Author [Alan Mishchenko]
Affiliation [UC Berkeley]
Date [Ver. 1.0. Started - April 28, 2007.]
Revision [
]
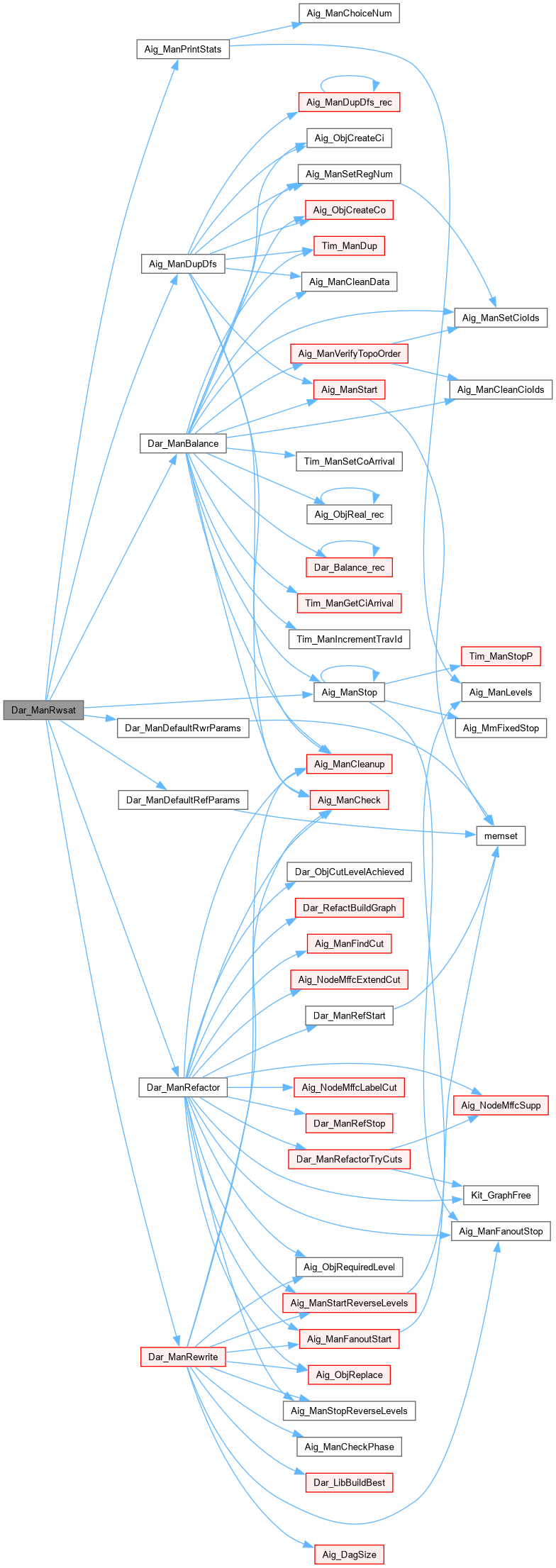
Function*************************************************************
Synopsis [Reproduces script "rwsat".]
Description []
SideEffects [This procedure does not tighten level during restructuring.]
SeeAlso []
Definition at line 71 of file darScript.c.