|
ABC: A System for Sequential Synthesis and Verification
|

|
|
ABC: A System for Sequential Synthesis and Verification
|
|
#include "bmc.h"#include "aig/gia/giaAig.h"#include "sat/bsat/satStore.h"#include "sat/cnf/cnf.h"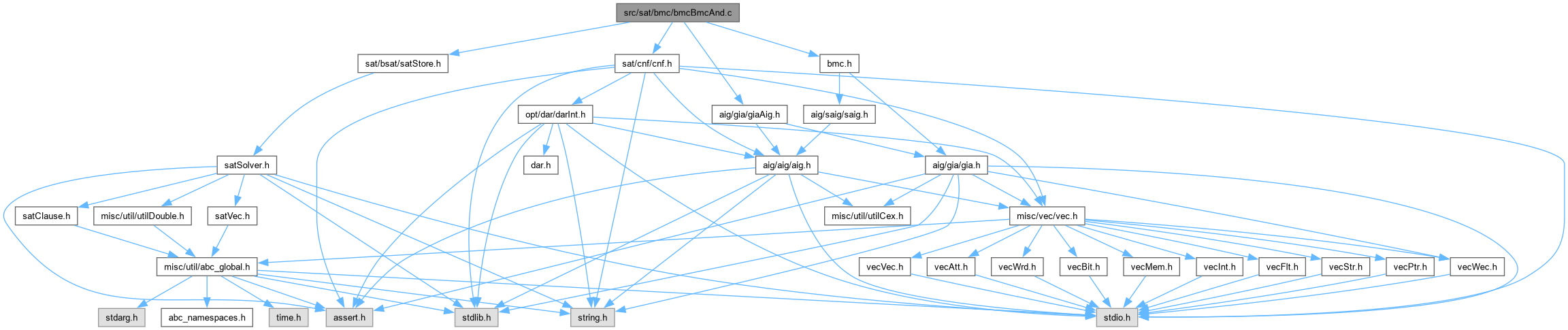
Go to the source code of this file.
Classes | |
| struct | Bmc_Mna_t_ |
Typedefs | |
| typedef typedefABC_NAMESPACE_IMPL_START struct Bmc_Mna_t_ | Bmc_Mna_t |
| DECLARATIONS ///. | |
| typedef typedefABC_NAMESPACE_IMPL_START struct Bmc_Mna_t_ Bmc_Mna_t |
DECLARATIONS ///.
CFile****************************************************************
FileName [bmcBmcAnd.c]
SystemName [ABC: Logic synthesis and verification system.]
PackageName [SAT-based bounded model checking.]
Synopsis [Memory-efficient BMC engine]
Author [Alan Mishchenko]
Affiliation [UC Berkeley]
Date [Ver. 1.0. Started - June 20, 2005.]
Revision [
]
Definition at line 33 of file bmcBmcAnd.c.
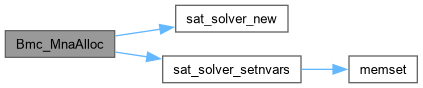
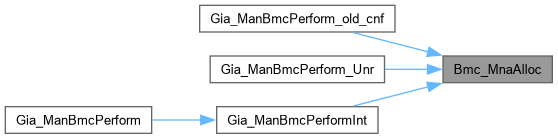
| Bmc_Mna_t * Bmc_MnaAlloc | ( | ) |
Function*************************************************************
Synopsis [BMC manager manipulation.]
Description []
SideEffects []
SeeAlso []
Definition at line 389 of file bmcBmcAnd.c.
| void Bmc_MnaBuild | ( | Gia_Man_t * | p, |
| Vec_Int_t * | vCos, | ||
| Vec_Int_t * | vNodes, | ||
| Gia_Man_t * | pNew, | ||
| Vec_Int_t * | vMap, | ||
| Vec_Int_t * | vPiMap ) |
Definition at line 256 of file bmcBmcAnd.c.


| void Bmc_MnaBuild_rec | ( | Gia_Man_t * | p, |
| Gia_Obj_t * | pObj, | ||
| Gia_Man_t * | pNew, | ||
| Vec_Int_t * | vMap, | ||
| Vec_Int_t * | vPiMap ) |
Function*************************************************************
Synopsis [Build AIG for the selected cones.]
Description []
SideEffects []
SeeAlso []
Definition at line 228 of file bmcBmcAnd.c.


Definition at line 160 of file bmcBmcAnd.c.


Function*************************************************************
Synopsis [Collect AIG nodes for the group of POs.]
Description []
SideEffects []
SeeAlso []
Definition at line 142 of file bmcBmcAnd.c.

| void Bmc_MnaFree | ( | Bmc_Mna_t * | p | ) |
Definition at line 403 of file bmcBmcAnd.c.

Definition at line 205 of file bmcBmcAnd.c.


Function*************************************************************
Synopsis [Select related logic cones for the COs.]
Description []
SideEffects []
SeeAlso []
Definition at line 187 of file bmcBmcAnd.c.


| Vec_Ptr_t * Bmc_MnaTernary | ( | Gia_Man_t * | p, |
| int | nFrames, | ||
| int | nFramesAdd, | ||
| int | fVerbose, | ||
| int * | iFirst ) |
FUNCTION DEFINITIONS ///.
Function*************************************************************
Synopsis [Performs ternary simulation of the manager.]
Description []
SideEffects []
SeeAlso []
Definition at line 74 of file bmcBmcAnd.c.

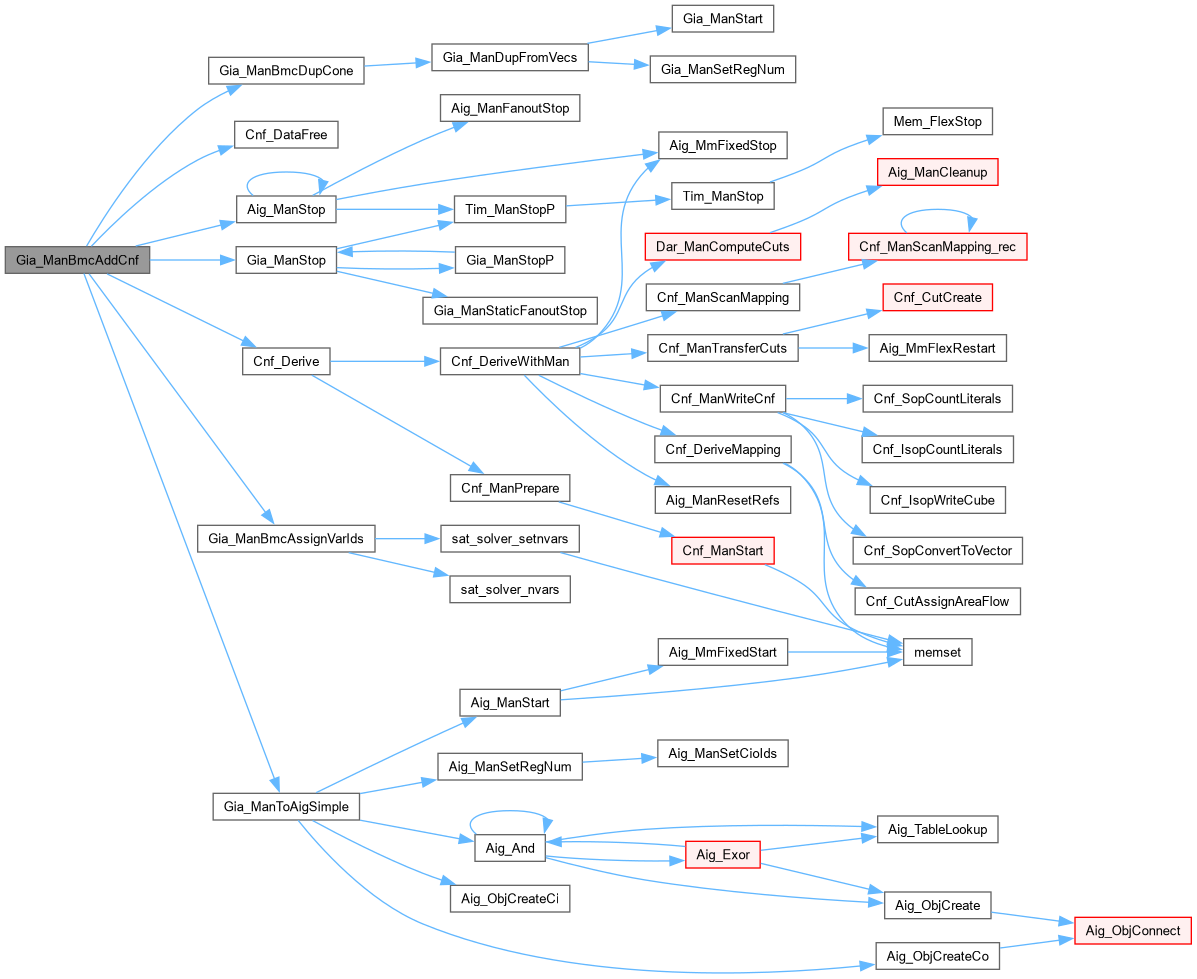
| void Gia_ManBmcAddCnf | ( | Bmc_Mna_t * | p, |
| Gia_Man_t * | pGia, | ||
| Vec_Int_t * | vIns, | ||
| Vec_Int_t * | vNodes, | ||
| Vec_Int_t * | vOuts ) |
Function*************************************************************
Synopsis [Derives CNF for the given cone.]
Description []
SideEffects []
SeeAlso []
Definition at line 500 of file bmcBmcAnd.c.
| void Gia_ManBmcAddCnfNew | ( | Bmc_Mna_t * | p, |
| int | iStart, | ||
| int | iStop ) |
Definition at line 914 of file bmcBmcAnd.c.


Function*************************************************************
Synopsis []
Description []
SideEffects []
SeeAlso []
Definition at line 868 of file bmcBmcAnd.c.


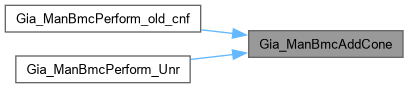
| void Gia_ManBmcAddCone | ( | Bmc_Mna_t * | p, |
| int | iStart, | ||
| int | iStop ) |
Definition at line 589 of file bmcBmcAnd.c.

Function*************************************************************
Synopsis [Collects new nodes.]
Description []
SideEffects []
SeeAlso []
Definition at line 573 of file bmcBmcAnd.c.

| int Gia_ManBmcAssignVarIds | ( | Bmc_Mna_t * | p, |
| Vec_Int_t * | vIns, | ||
| Vec_Int_t * | vUsed, | ||
| Vec_Int_t * | vOuts ) |
Function*************************************************************
Synopsis [Derives GIA for the given cone.]
Description []
SideEffects []
SeeAlso []
Definition at line 467 of file bmcBmcAnd.c.


Function*************************************************************
Synopsis [Generate counter-example.]
Description []
SideEffects []
SeeAlso []
Definition at line 735 of file bmcBmcAnd.c.


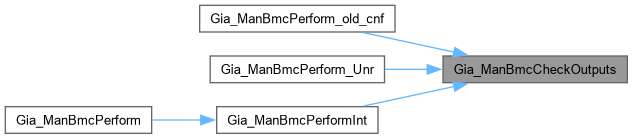
| int Gia_ManBmcCheckOutputs | ( | Gia_Man_t * | pFrames, |
| int | iStart, | ||
| int | iStop ) |
Function*************************************************************
Synopsis []
Description []
SideEffects []
SeeAlso []
Definition at line 623 of file bmcBmcAnd.c.
| Gia_Man_t * Gia_ManBmcDupCone | ( | Gia_Man_t * | p, |
| Vec_Int_t * | vIns, | ||
| Vec_Int_t * | vNodes, | ||
| Vec_Int_t * | vOuts ) |
Function*************************************************************
Synopsis [Derives GIA for the given cone.]
Description []
SideEffects []
SeeAlso []
Definition at line 426 of file bmcBmcAnd.c.


| int Gia_ManBmcFindFirst | ( | Gia_Man_t * | pFrames | ) |
Definition at line 631 of file bmcBmcAnd.c.

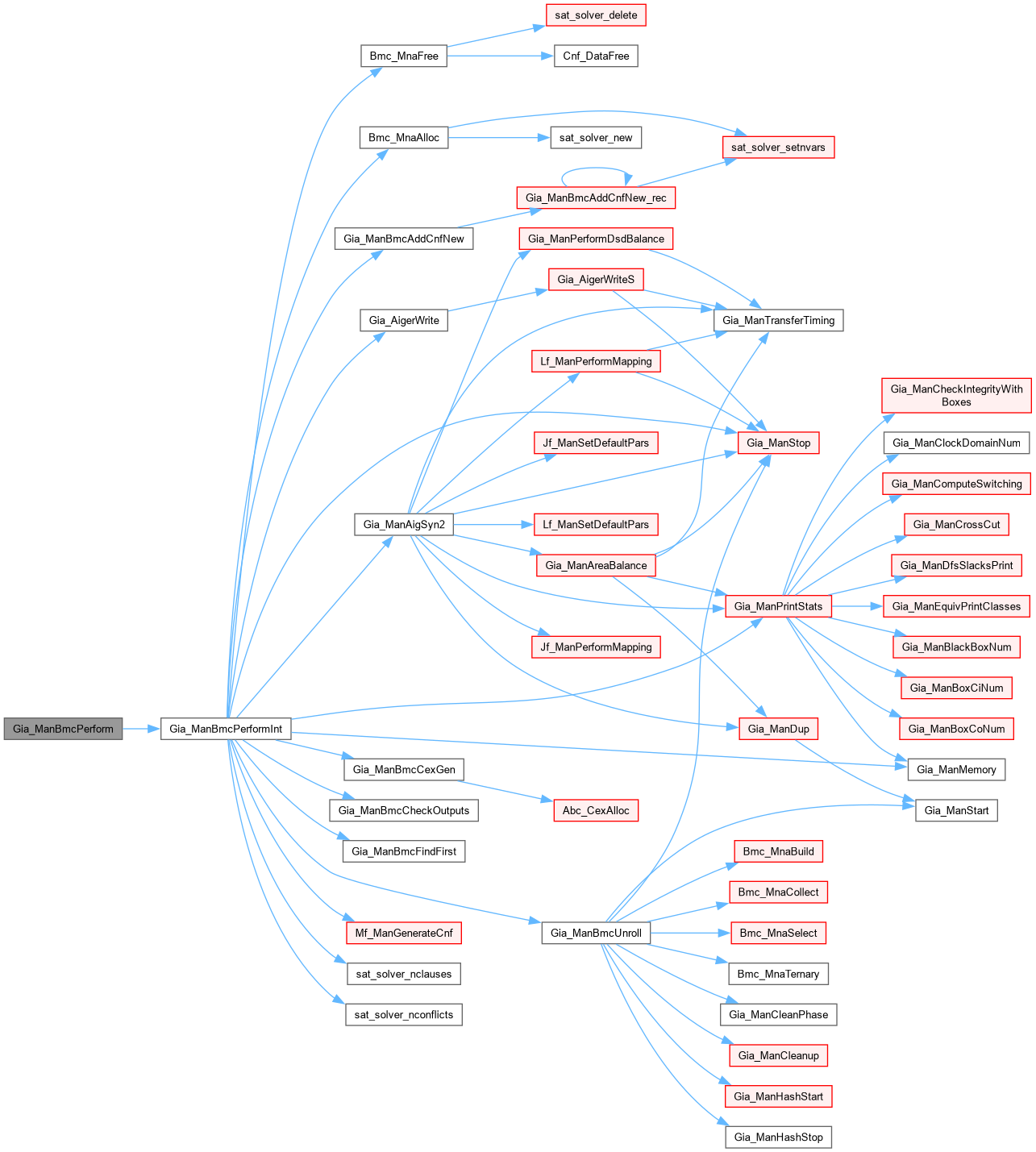
| int Gia_ManBmcPerform | ( | Gia_Man_t * | pGia, |
| Bmc_AndPar_t * | pPars ) |
Function*************************************************************
Synopsis []
Description []
SideEffects []
SeeAlso []
Definition at line 1066 of file bmcBmcAnd.c.
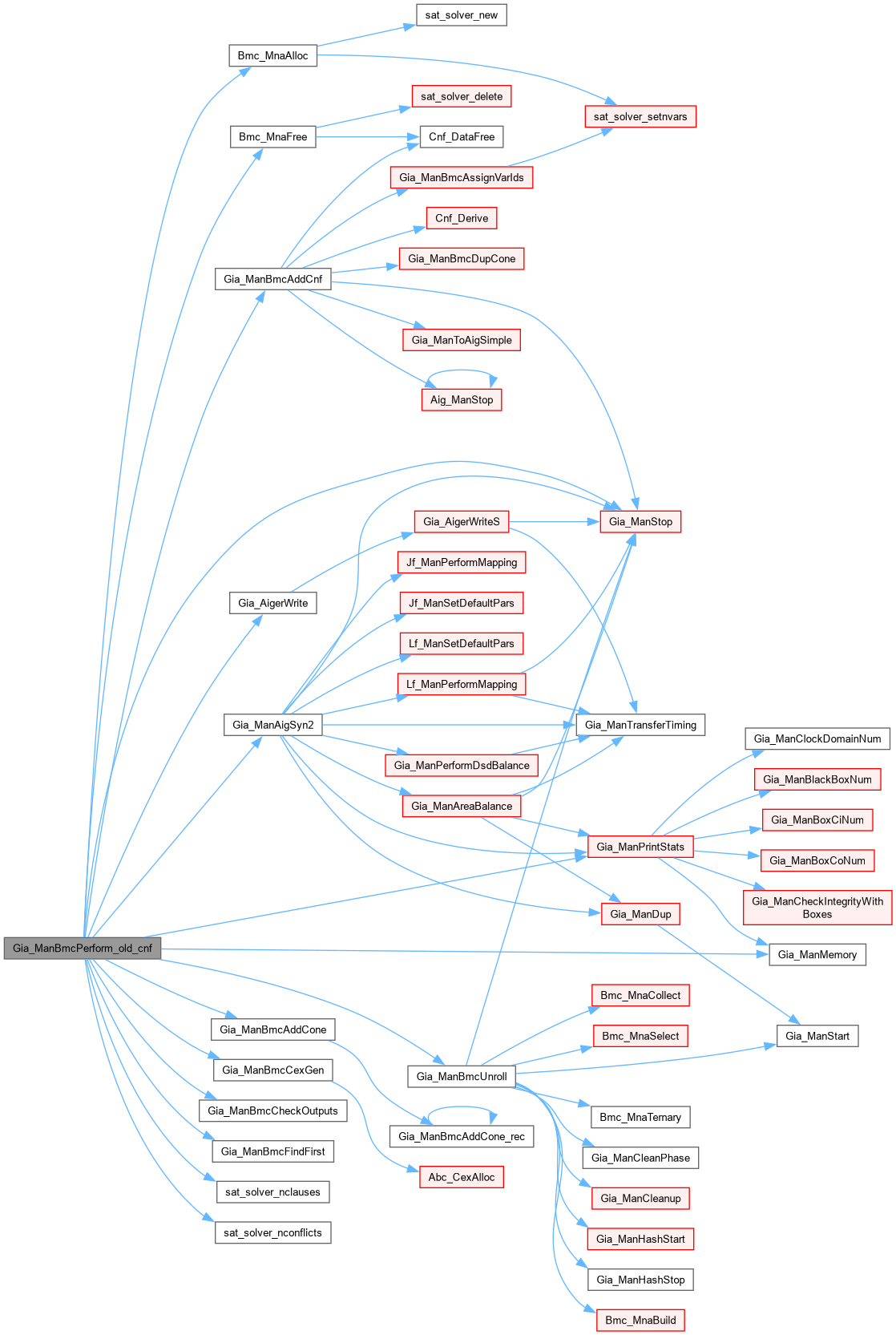
| int Gia_ManBmcPerform_old_cnf | ( | Gia_Man_t * | pGia, |
| Bmc_AndPar_t * | pPars ) |
Function*************************************************************
Synopsis []
Description []
SideEffects []
SeeAlso []
Definition at line 773 of file bmcBmcAnd.c.
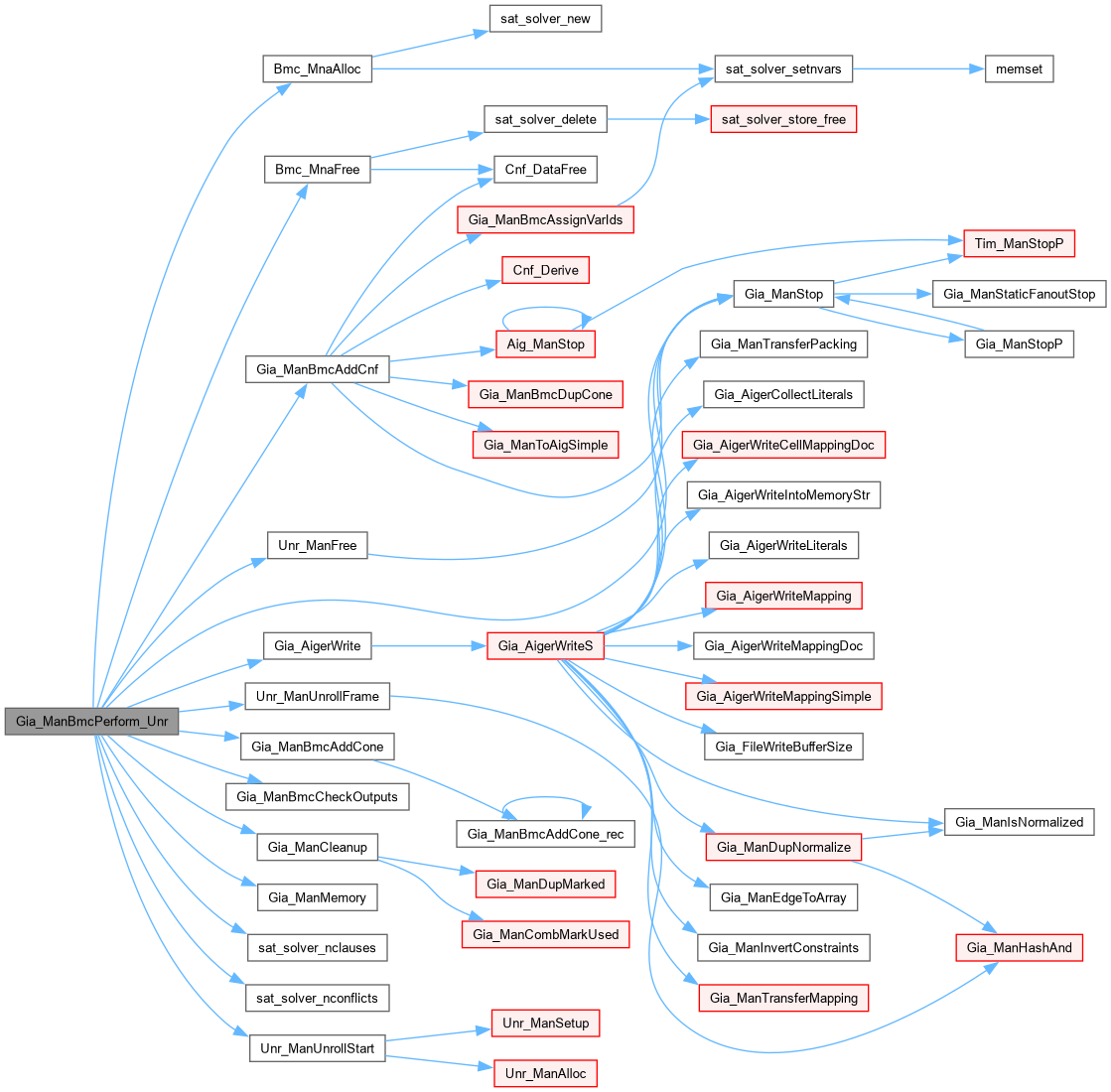
| int Gia_ManBmcPerform_Unr | ( | Gia_Man_t * | pGia, |
| Bmc_AndPar_t * | pPars ) |
Function*************************************************************
Synopsis []
Description []
SideEffects []
SeeAlso []
Definition at line 652 of file bmcBmcAnd.c.
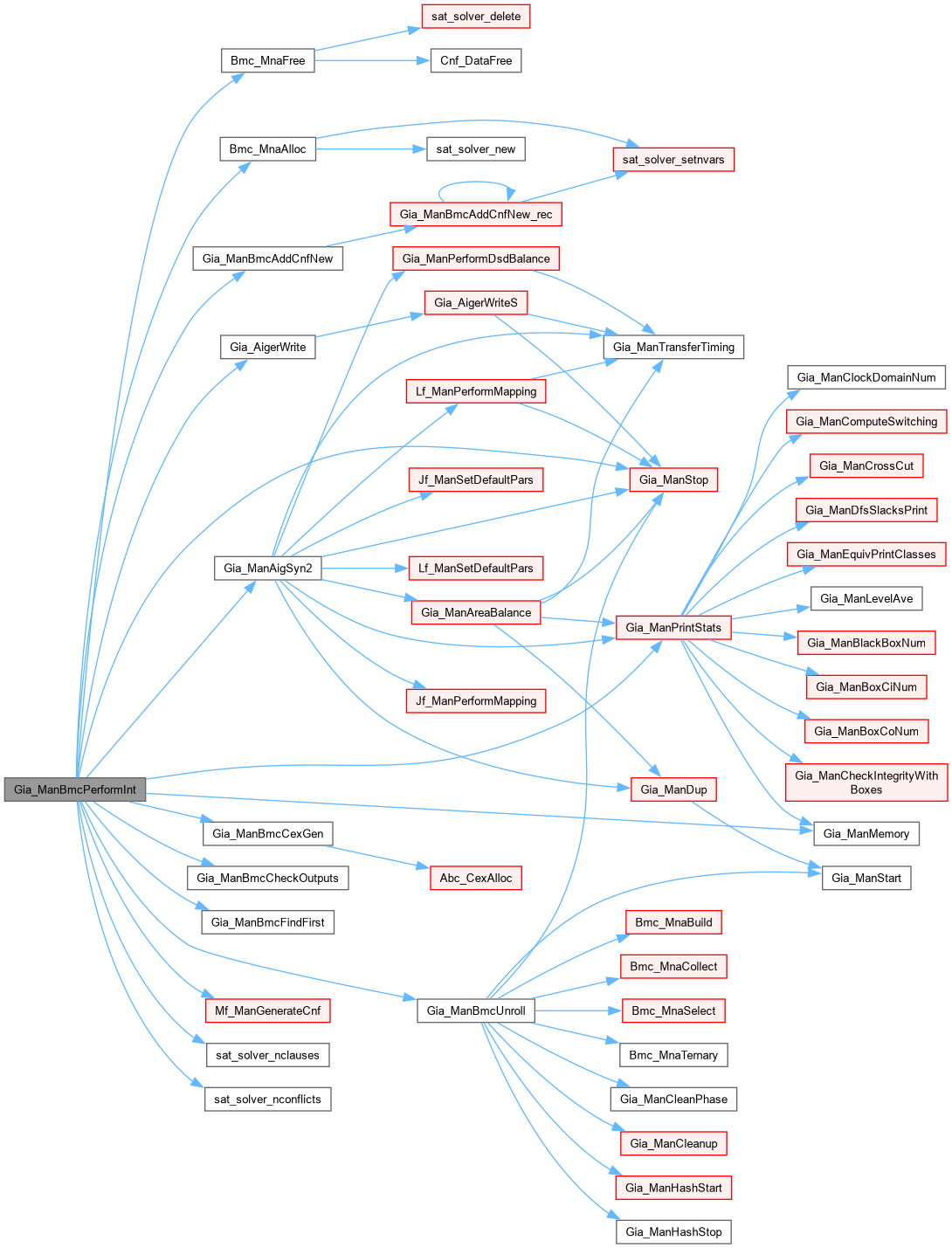
| int Gia_ManBmcPerformInt | ( | Gia_Man_t * | pGia, |
| Bmc_AndPar_t * | pPars ) |
Function*************************************************************
Synopsis []
Description []
SideEffects []
SeeAlso []
Definition at line 957 of file bmcBmcAnd.c.

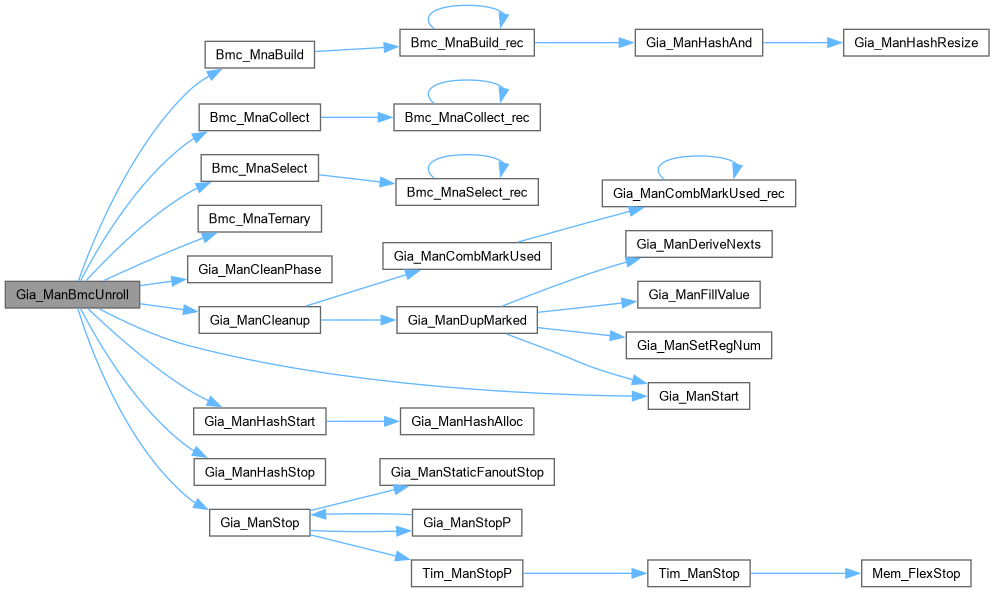
| Gia_Man_t * Gia_ManBmcUnroll | ( | Gia_Man_t * | pGia, |
| int | nFramesMax, | ||
| int | nFramesAdd, | ||
| int | fVerbose, | ||
| Vec_Int_t ** | pvPiMap ) |
Function*************************************************************
Synopsis [Compute the first non-trivial timeframe.]
Description []
SideEffects []
SeeAlso []
Definition at line 284 of file bmcBmcAnd.c.