|
ABC: A System for Sequential Synthesis and Verification
|

|
|
ABC: A System for Sequential Synthesis and Verification
|
|


Go to the source code of this file.
Classes | |
| struct | Dch_Man_t_ |
Typedefs | |
| typedef typedefABC_NAMESPACE_HEADER_START struct Dch_Cla_t_ | Dch_Cla_t |
| INCLUDES ///. | |
| typedef struct Dch_Man_t_ | Dch_Man_t |
| typedef typedefABC_NAMESPACE_HEADER_START struct Dch_Cla_t_ Dch_Cla_t |
INCLUDES ///.
CFile****************************************************************
FileName [dchInt.h]
SystemName [ABC: Logic synthesis and verification system.]
PackageName [Choice computation for tech-mapping.]
Synopsis [External declarations.]
Author [Alan Mishchenko]
Affiliation [UC Berkeley]
Date [Ver. 1.0. Started - June 29, 2008.]
Revision [
] PARAMETERS /// BASIC TYPES ///
| typedef struct Dch_Man_t_ Dch_Man_t |
|
extern |
Function*************************************************************
Synopsis [Returns equivalence class of the given node.]
Description []
SideEffects []
SeeAlso []
Definition at line 546 of file dchClass.c.
Function*************************************************************
Synopsis [Returns equivalence class of the given node.]
Description []
SideEffects []
SeeAlso []
Definition at line 525 of file dchClass.c.
|
extern |
Function*************************************************************
Synopsis [Stop representation of equivalence classes.]
Description []
SideEffects []
SeeAlso []
Definition at line 206 of file dchClass.c.
|
extern |
Function*************************************************************
Synopsis [Creates initial simulation classes.]
Description [Assumes that simulation info is assigned.]
SideEffects []
SeeAlso []
Definition at line 336 of file dchClass.c.

|
extern |
Function*************************************************************
Synopsis [Prints simulation classes.]
Description []
SideEffects []
SeeAlso []
Definition at line 303 of file dchClass.c.

Function*************************************************************
Synopsis [Stop representation of equivalence classes.]
Description []
SideEffects []
SeeAlso []
Definition at line 222 of file dchClass.c.
|
extern |
Function*************************************************************
Synopsis [Refines the classes after simulation.]
Description []
SideEffects []
SeeAlso []
Definition at line 504 of file dchClass.c.

Function*************************************************************
Synopsis [Refine the group of constant 1 nodes.]
Description []
SideEffects []
SeeAlso []
Definition at line 570 of file dchClass.c.


Function*************************************************************
Synopsis [Iteratively refines the classes after simulation.]
Description [Returns the number of refinements performed.]
SideEffects []
SeeAlso []
Definition at line 443 of file dchClass.c.

|
extern |
Function*************************************************************
Synopsis [Starts representation of equivalence classes.]
Description []
SideEffects []
SeeAlso []
Definition at line 163 of file dchClass.c.
Function*************************************************************
Synopsis [Starts representation of equivalence classes.]
Description []
SideEffects []
SeeAlso []
Definition at line 137 of file dchClass.c.

|
extern |
Function*************************************************************
Synopsis [Stop representation of equivalence classes.]
Description []
SideEffects []
SeeAlso []
Definition at line 185 of file dchClass.c.
Function*************************************************************
Synopsis [Updates the solver clause database.]
Description []
SideEffects []
SeeAlso []
Definition at line 287 of file dchCnf.c.
Function*************************************************************
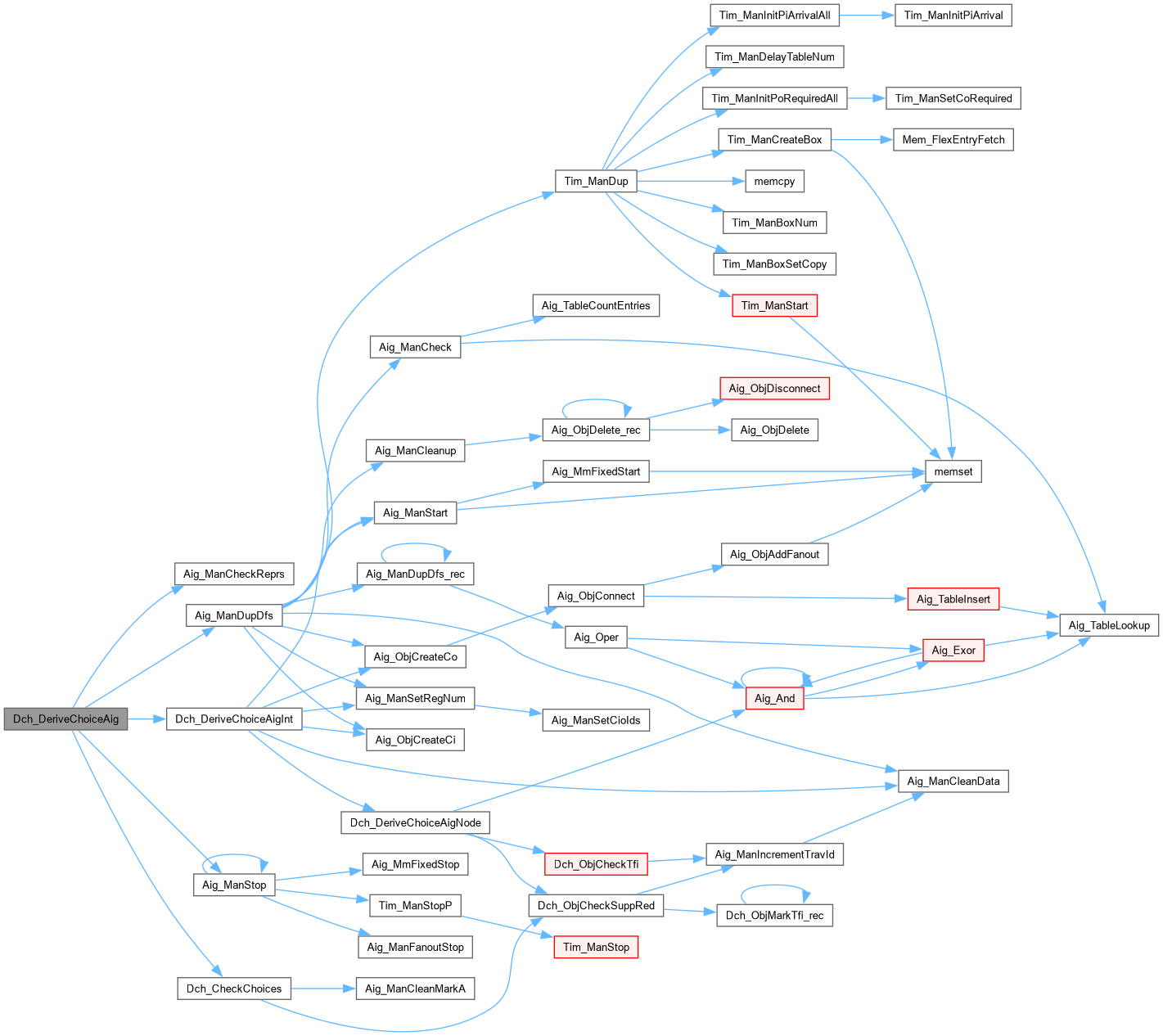
Synopsis [Derives candidate equivalence classes of AIG nodes.]
Description []
SideEffects []
SeeAlso []
Definition at line 264 of file dchSim.c.
Definition at line 524 of file dchChoice.c.
|
extern |
Definition at line 89 of file dchChoice.c.
|
extern |
FUNCTION DECLARATIONS ///.
Function*************************************************************
Synopsis [Counts the number of representatives.]
Description []
SideEffects []
SeeAlso []
Definition at line 75 of file dchChoice.c.
|
extern |
DECLARATIONS ///.
CFile****************************************************************
FileName [dchMan.c]
SystemName [ABC: Logic synthesis and verification system.]
PackageName [Choice computation for tech-mapping.]
Synopsis [Calls to the SAT solver.]
Author [Alan Mishchenko]
Affiliation [UC Berkeley]
Date [Ver. 1.0. Started - June 29, 2008.]
Revision [
] FUNCTION DEFINITIONS /// Function*************************************************************
Synopsis [Creates the manager.]
Description []
SideEffects []
SeeAlso []
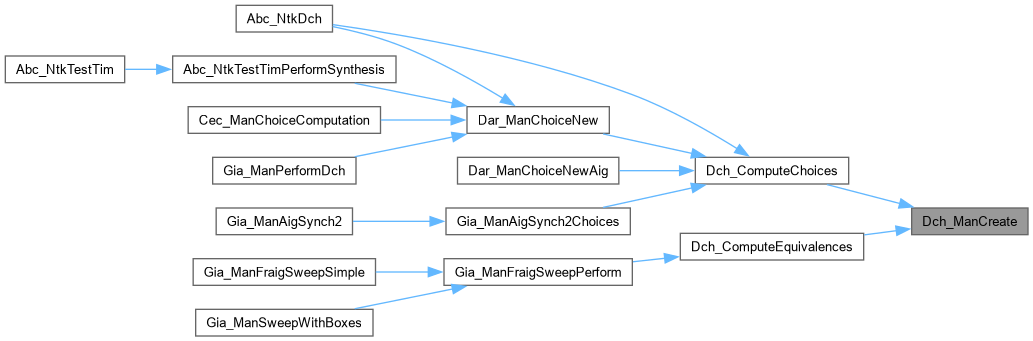
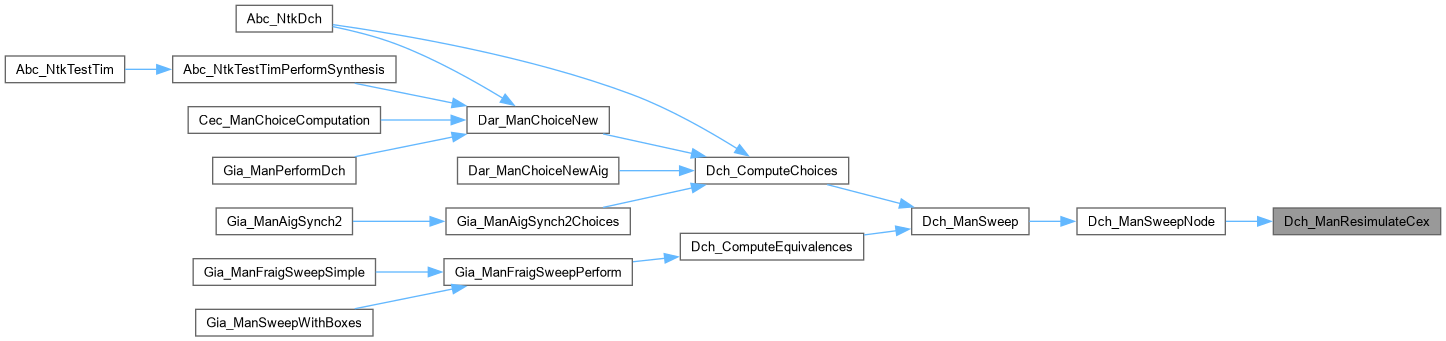
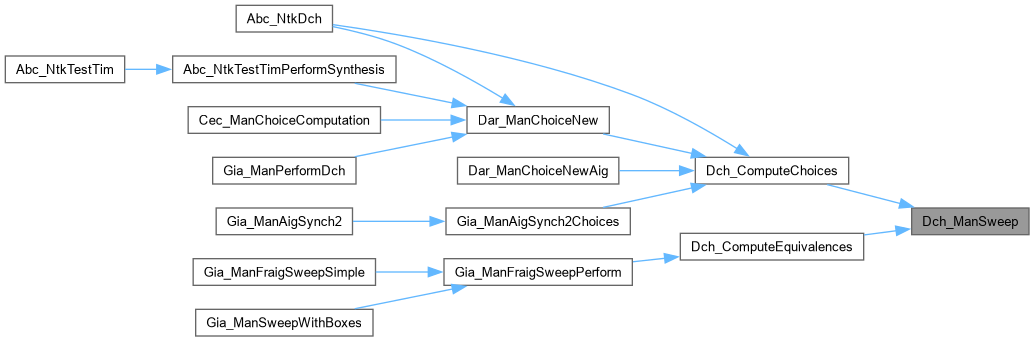
Definition at line 45 of file dchMan.c.

Function*************************************************************
Synopsis [Handle the counter-example.]
Description []
SideEffects []
SeeAlso []
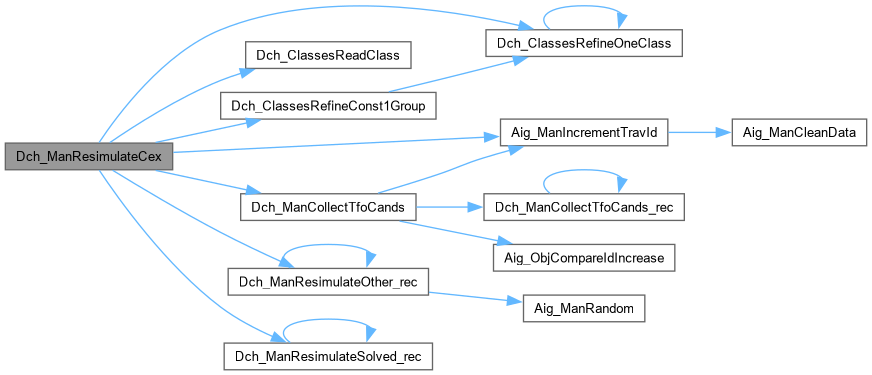
Definition at line 177 of file dchSimSat.c.
Function*************************************************************
Synopsis [Handle the counter-example.]
Description []
SideEffects []
SeeAlso []
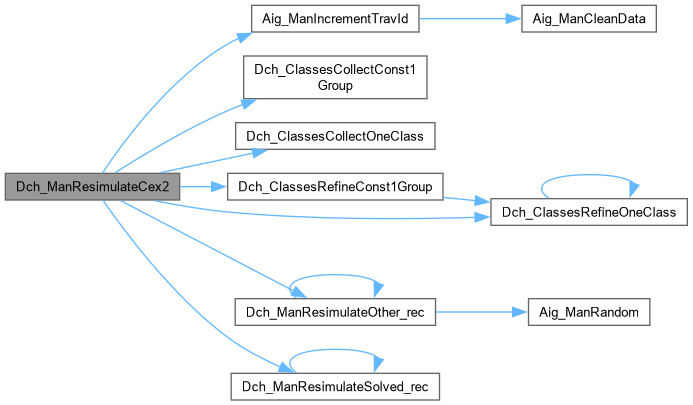
Definition at line 225 of file dchSimSat.c.
|
extern |
Function*************************************************************
Synopsis [Recycles the SAT solver.]
Description []
SideEffects []
SeeAlso []
Definition at line 153 of file dchMan.c.

|
extern |
Function*************************************************************
Synopsis [Frees the manager.]
Description []
SideEffects []
SeeAlso []
Definition at line 122 of file dchMan.c.
|
extern |
Function*************************************************************
Synopsis [Performs fraiging for the internal nodes.]
Description []
SideEffects []
SeeAlso []
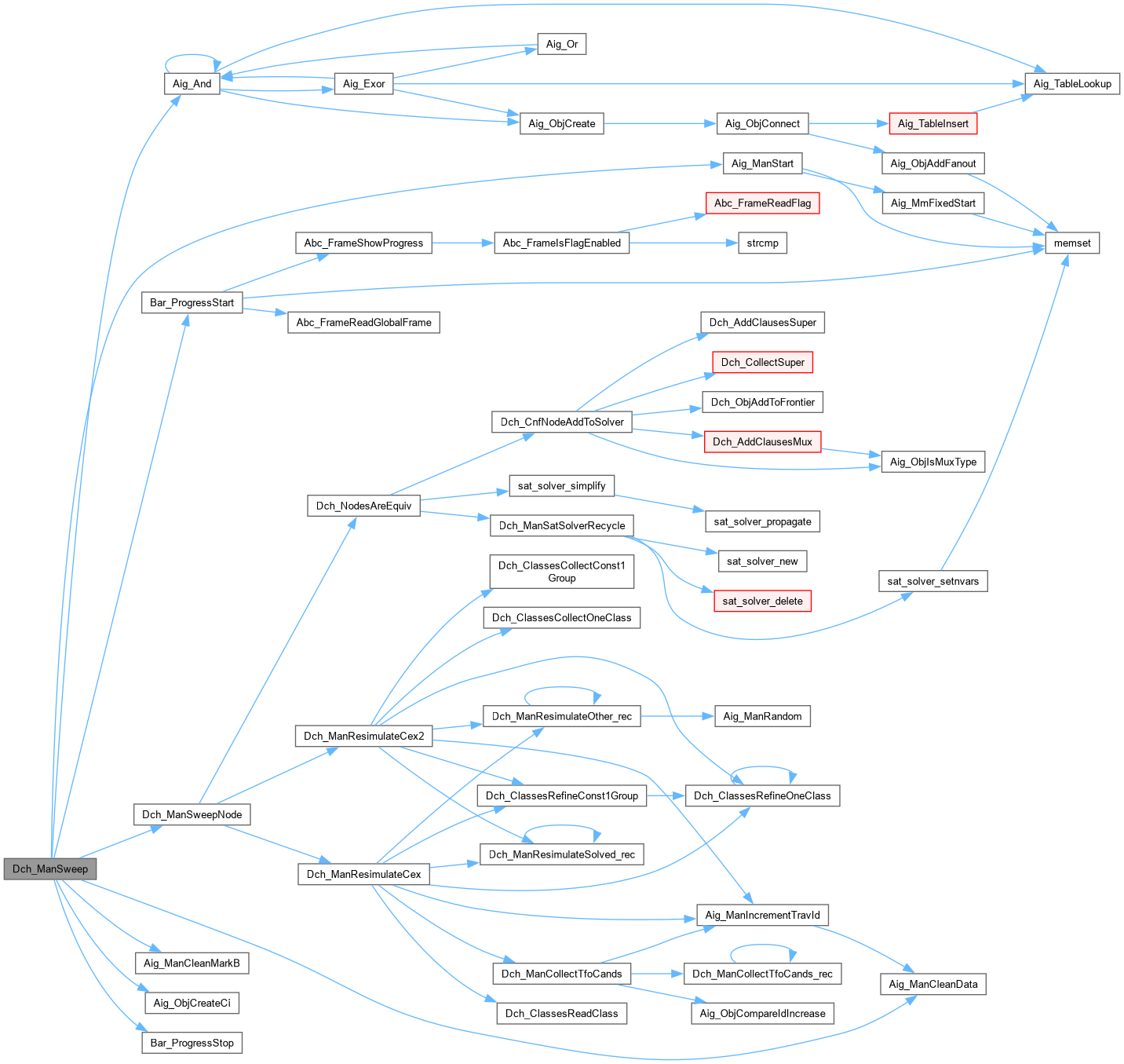
Definition at line 106 of file dchSweep.c.
DECLARATIONS ///.
CFile****************************************************************
FileName [dchSat.c]
SystemName [ABC: Logic synthesis and verification system.]
PackageName [Choice computation for tech-mapping.]
Synopsis [Calls to the SAT solver.]
Author [Alan Mishchenko]
Affiliation [UC Berkeley]
Date [Ver. 1.0. Started - June 29, 2008.]
Revision [
] FUNCTION DEFINITIONS /// Function*************************************************************
Synopsis [Runs equivalence test for the two nodes.]
Description []
SideEffects []
SeeAlso []
Definition at line 45 of file dchSat.c.